 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLSI Architectures of Forward Kinematic Processor for Robotics Applications
Mar 07, 2024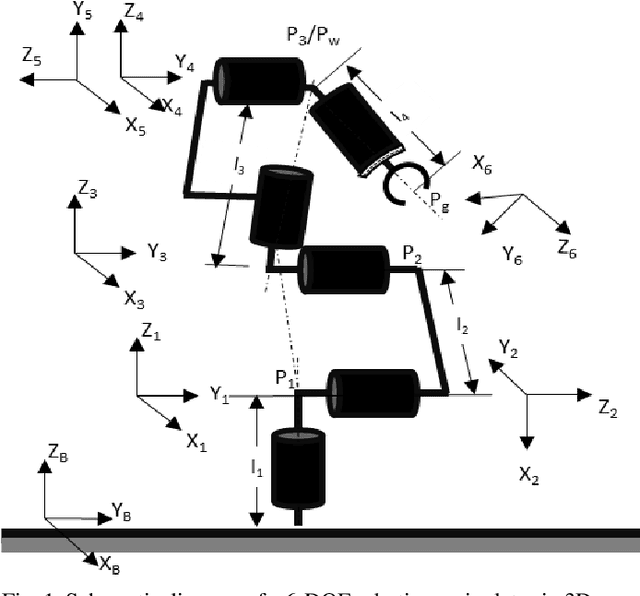
This paper aims to get a comprehensive review of current-day robotic computation technologies at VLSI architecture level. We studied several repots in the domain of robotic processor architecture. In this work, we focused on the forward kinematics architectures which consider CORDIC algorithms, VLSI circuits of WE DSP16 chip, parallel processing and pipelined architecture, and lookup table formula and FPGA processor. This study gives us an understanding of different implementation methods for forward kinematics. Our goal is to develop a forward kinematics processor with FPGA for real-time applications, requires a fast response time and low latency of these devices, useful for industrial automation where the processing speed plays a great role.
BLOOM: A 176B-Parameter Open-Access Multilingual Language Model
Nov 09, 2022Large language models (LLMs) have been shown to be able to perform new tasks based on a few demonstrations or natural language instructions. While these capabilities have led to widespread adoption, most LLMs are developed by resource-rich organizations and are frequently kept from the public. As a step towards democratizing this powerful technology, we present BLOOM, a 176B-parameter open-access language model designed and built thanks to a collaboration of hundreds of researchers. BLOOM is a decoder-only Transformer language model that was trained on the ROOTS corpus, a dataset comprising hundreds of sources in 46 natural and 13 programming languages (59 in total). We find that BLOOM achieves competitive performance on a wide variety of benchmarks, with stronger results after undergoing multitask prompted finetuning. To facilitate future research and applications using LLMs, we publicly release our models and code under the Responsible AI License.