 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChainLearn: A Blockchain-Based Capacity-Aware Framework for Federated Ensemble Learning
May 23, 2026Federated learning is used in medical imaging where privacy prohibits centralizing data. Standard federated algorithms assume homogeneous hardware, identical architectures, and centralized aggregation, which fails when hospitals have unequal compute resources. We propose capacity-aware coordination: measure each hospital's throughput, assign capacity-appropriate architectures (MobileNetV3-Small, EfficientNet-B0, ResNet-50), and combine predictions via weighted ensemble. Weak and strong hospitals can participate without forcing uniform architectures. We separate on-chain policy from off-chain learning. A Solidity contract stores hospital registration, benchmark hashes, metrics, and weights. Hospitals train locally and submit only hashes and scalars (not parameters). Weighted ensemble inference is computed off-chain. Experiments on PneumoniaMNIST and DermaMNIST (5 seeds, 3 non-IID levels) show our method achieves lower or equal calibration error versus equal-weight ensemble and competitive accuracy versus FedAvg, FedProx, and FedMD. Communication overhead is 224 bytes per round, a reduction of over 912,000x compared to FedAvg.
SpectralKrum: A Spectral-Geometric Defense Against Byzantine Attacks in Federated Learning
Dec 12, 2025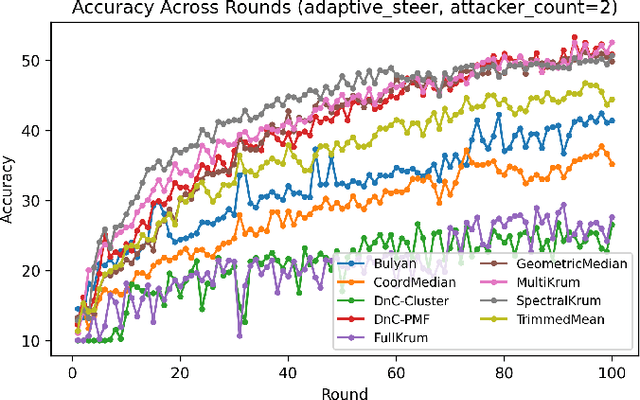



Federated Learning (FL) distributes model training across clients who retain their data locally, but this architecture exposes a fundamental vulnerability: Byzantine clients can inject arbitrarily corrupted updates that degrade or subvert the global model. While robust aggregation methods (including Krum, Bulyan, and coordinate-wise defenses) offer theoretical guarantees under idealized assumptions, their effectiveness erodes substantially when client data distributions are heterogeneous (non-IID) and adversaries can observe or approximate the defense mechanism. This paper introduces SpectralKrum, a defense that fuses spectral subspace estimation with geometric neighbor-based selection. The core insight is that benign optimization trajectories, despite per-client heterogeneity, concentrate near a low-dimensional manifold that can be estimated from historical aggregates. SpectralKrum projects incoming updates into this learned subspace, applies Krum selection in compressed coordinates, and filters candidates whose orthogonal residual energy exceeds a data-driven threshold. The method requires no auxiliary data, operates entirely on model updates, and preserves FL privacy properties. We evaluate SpectralKrum against eight robust baselines across seven attack scenarios on CIFAR-10 with Dirichlet-distributed non-IID partitions (alpha = 0.1). Experiments spanning over 56,000 training rounds show that SpectralKrum is competitive against directional and subspace-aware attacks (adaptive-steer, buffer-drift), but offers limited advantage under label-flip and min-max attacks where malicious updates remain spectrally indistinguishable from benign ones.
VLSI Architectures of Forward Kinematic Processor for Robotics Applications
Mar 07, 2024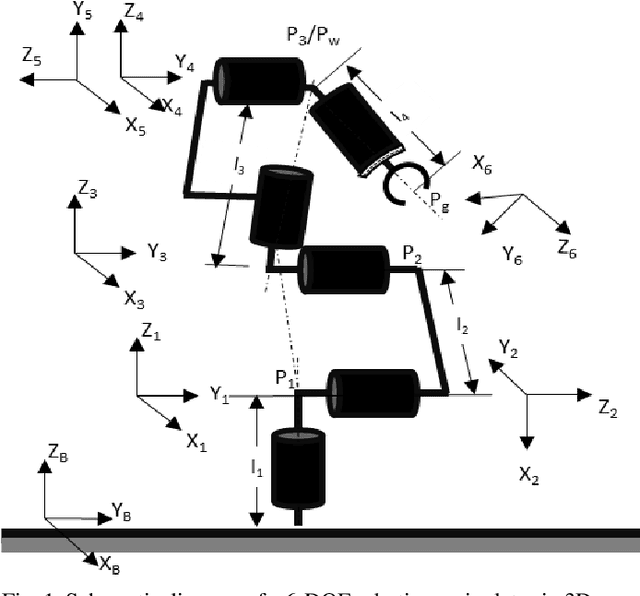
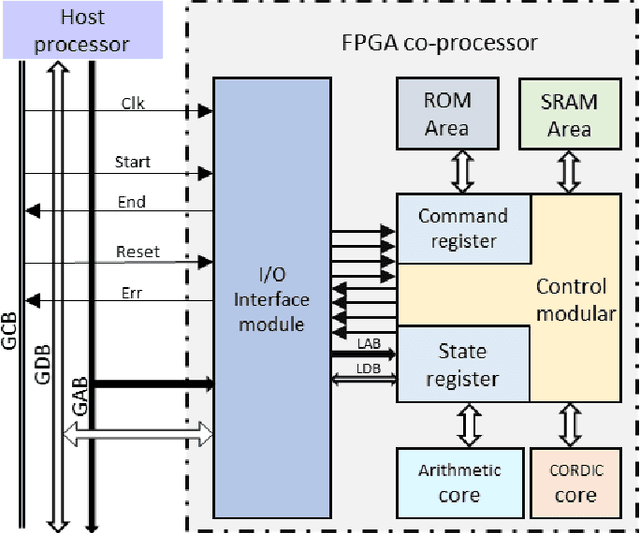
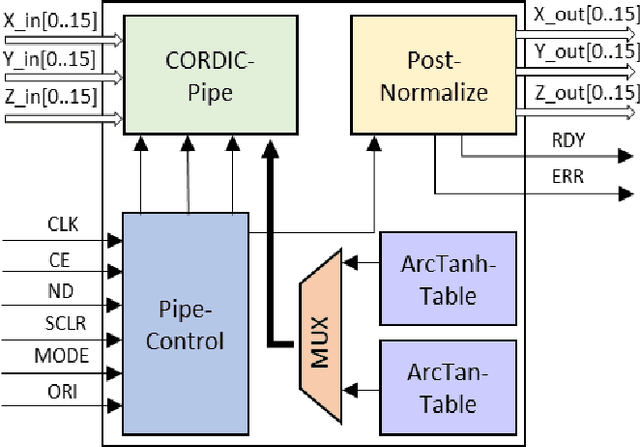
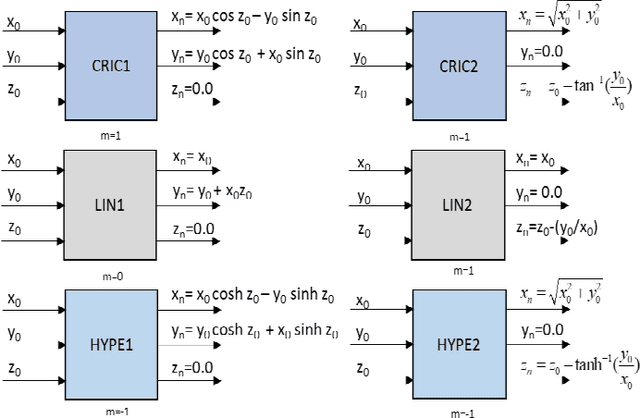
This paper aims to get a comprehensive review of current-day robotic computation technologies at VLSI architecture level. We studied several repots in the domain of robotic processor architecture. In this work, we focused on the forward kinematics architectures which consider CORDIC algorithms, VLSI circuits of WE DSP16 chip, parallel processing and pipelined architecture, and lookup table formula and FPGA processor. This study gives us an understanding of different implementation methods for forward kinematics. Our goal is to develop a forward kinematics processor with FPGA for real-time applications, requires a fast response time and low latency of these devices, useful for industrial automation where the processing speed plays a great role.