 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStratified Hazard Sampling: Minimal-Variance Event Scheduling for CTMC/DTMC Discrete Diffusion and Flow Models
Jan 06, 2026CTMC/DTMC-based discrete generative models, including uniform-noise discrete diffusion (e.g., D3PM/CTDD) and discrete flow matching, enable non-autoregressive sequence generation by repeatedly replacing tokens through a time-inhomogeneous Markov process. Inference is typically implemented with step-based simulation: each token decides to jump via independent Bernoulli (or categorical) draws at every discretization step. Under uniform-noise initialization, where self-correction requires multiple edits per position, these independent decisions induce substantial variance in both the number and timing of edits, leading to characteristic failure modes such as under-editing (residual noise) or over-editing (cascading unnecessary substitutions), decreasing reproducibility. We propose Stratified Hazard Sampling (SHS), a drop-in and hyperparameter-free inference principle for any sampler that admits a stay-vs.-replace decomposition. SHS models per-token edits as events driven by cumulative hazard (CTMC) or cumulative jump mass (DTMC) and places events by stratifying this cumulative quantity: with a single random phase per position, a token jumps whenever its accumulated hazard crosses unit-spaced thresholds. This preserves the expected number of jumps while achieving the minimum possible variance among unbiased integer estimators (bounded by 1/4), without altering per-jump destination sampling and thus retaining multimodality. We also introduce a phase-allocation variant for blacklist-style lexical constraints that prioritizes early edits at high-risk positions to mitigate late-masking artifacts.
CFG-EC: Error Correction Classifier-Free Guidance
Nov 18, 2025Classifier-Free Guidance (CFG) has become a mainstream approach for simultaneously improving prompt fidelity and generation quality in conditional generative models. During training, CFG stochastically alternates between conditional and null prompts to enable both conditional and unconditional generation. However, during sampling, CFG outputs both null and conditional prompts simultaneously, leading to inconsistent noise estimates between the training and sampling processes. To reduce this error, we propose CFG-EC, a versatile correction scheme augmentable to any CFG-based method by refining the unconditional noise predictions. CFG-EC actively realigns the unconditional noise error component to be orthogonal to the conditional error component. This corrective maneuver prevents interference between the two guidance components, thereby constraining the sampling error's upper bound and establishing more reliable guidance trajectories for high-fidelity image generation. Our numerical experiments show that CFG-EC handles the unconditional component more effectively than CFG and CFG++, delivering a marked performance increase in the low guidance sampling regime and consistently higher prompt alignment across the board.
Hybrid Conformal Prediction-based Risk-Aware Model Predictive Planning in Dense, Uncertain Environments
Jul 16, 2025Real-time path planning in dense, uncertain environments remains a challenging problem, as predicting the future motions of numerous dynamic obstacles is computationally burdensome and unrealistic. To address this, we introduce Hybrid Prediction-based Risk-Aware Planning (HyPRAP), a prediction-based risk-aware path-planning framework which uses a hybrid combination of models to predict local obstacle movement. HyPRAP uses a novel Prediction-based Collision Risk Index (P-CRI) to evaluate the risk posed by each obstacle, enabling the selective use of predictors based on whether the agent prioritizes high predictive accuracy or low computational prediction overhead. This selective routing enables the agent to focus on high-risk obstacles while ignoring or simplifying low-risk ones, making it suitable for environments with a large number of obstacles. Moreover, HyPRAP incorporates uncertainty quantification through hybrid conformal prediction by deriving confidence bounds simultaneously achieved by multiple predictions across different models. Theoretical analysis demonstrates that HyPRAP effectively balances safety and computational efficiency by leveraging the diversity of prediction models. Extensive simulations validate these insights for more general settings, confirming that HyPRAP performs better compared to single predictor methods, and P-CRI performs better over naive proximity-based risk assessment.
FaSTrack: a Modular Framework for Real-Time Motion Planning and Guaranteed Safe Tracking
Mar 13, 2021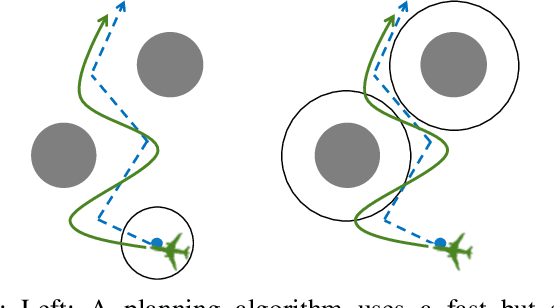
Real-time, guaranteed safe trajectory planning is vital for navigation in unknown environments. However, real-time navigation algorithms typically sacrifice robustness for computation speed. Alternatively, provably safe trajectory planning tends to be too computationally intensive for real-time replanning. We propose FaSTrack, Fast and Safe Tracking, a framework that achieves both real-time replanning and guaranteed safety. In this framework, real-time computation is achieved by allowing any trajectory planner to use a simplified \textit{planning model} of the system. The plan is tracked by the system, represented by a more realistic, higher-dimensional \textit{tracking model}. We precompute the tracking error bound (TEB) due to mismatch between the two models and due to external disturbances. We also obtain the corresponding tracking controller used to stay within the TEB. The precomputation does not require prior knowledge of the environment. We demonstrate FaSTrack using Hamilton-Jacobi reachability for precomputation and three different real-time trajectory planners with three different tracking-planning model pairs.
FaSTrack: a Modular Framework for Fast and Guaranteed Safe Motion Planning
Mar 21, 2017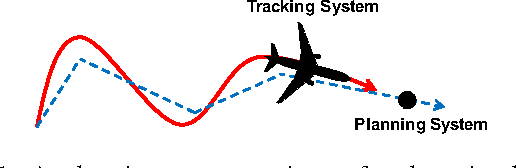
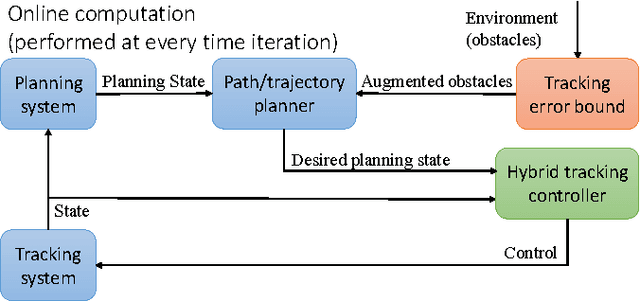
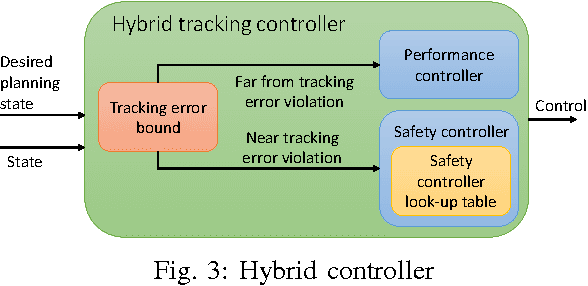
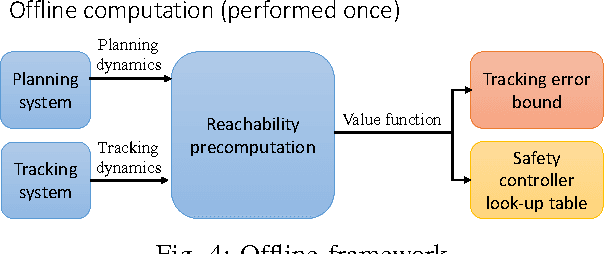
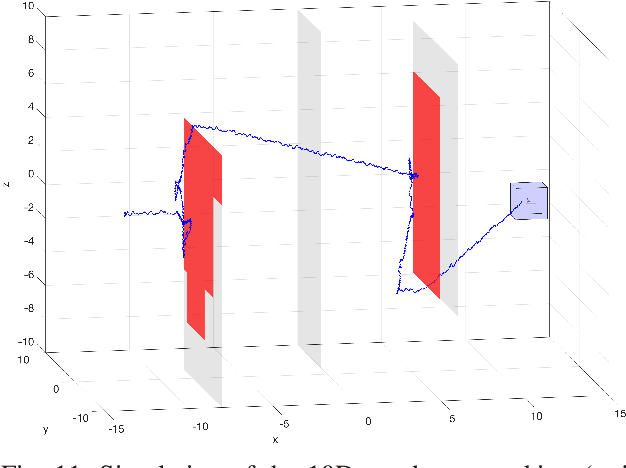
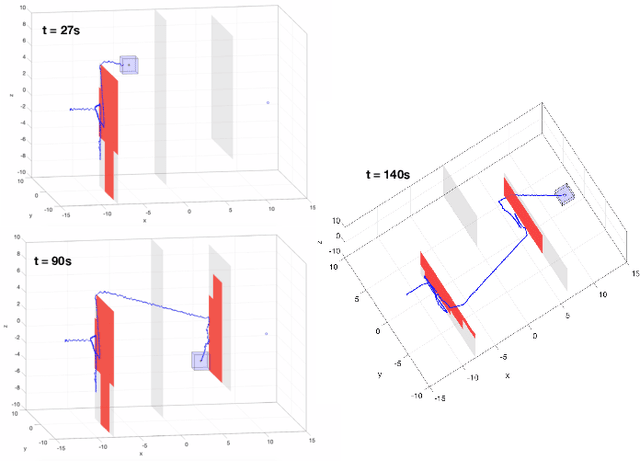
Fast and safe navigation of dynamical systems through a priori unknown cluttered environments is vital to many applications of autonomous systems. However, trajectory planning for autonomous systems is computationally intensive, often requiring simplified dynamics that sacrifice safety and dynamic feasibility in order to plan efficiently. Conversely, safe trajectories can be computed using more sophisticated dynamic models, but this is typically too slow to be used for real-time planning. We propose a new algorithm FaSTrack: Fast and Safe Tracking for High Dimensional systems. A path or trajectory planner using simplified dynamics to plan quickly can be incorporated into the FaSTrack framework, which provides a safety controller for the vehicle along with a guaranteed tracking error bound. This bound captures all possible deviations due to high dimensional dynamics and external disturbances. Note that FaSTrack is modular and can be used with most current path or trajectory planners. We demonstrate this framework using a 10D nonlinear quadrotor model tracking a 3D path obtained from an RRT planner.