 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFaSTrack: a Modular Framework for Real-Time Motion Planning and Guaranteed Safe Tracking
Paper and Code
Mar 13, 2021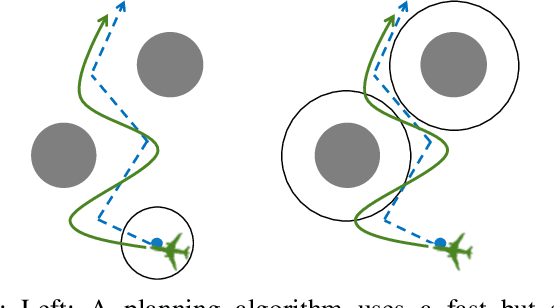
Real-time, guaranteed safe trajectory planning is vital for navigation in unknown environments. However, real-time navigation algorithms typically sacrifice robustness for computation speed. Alternatively, provably safe trajectory planning tends to be too computationally intensive for real-time replanning. We propose FaSTrack, Fast and Safe Tracking, a framework that achieves both real-time replanning and guaranteed safety. In this framework, real-time computation is achieved by allowing any trajectory planner to use a simplified \textit{planning model} of the system. The plan is tracked by the system, represented by a more realistic, higher-dimensional \textit{tracking model}. We precompute the tracking error bound (TEB) due to mismatch between the two models and due to external disturbances. We also obtain the corresponding tracking controller used to stay within the TEB. The precomputation does not require prior knowledge of the environment. We demonstrate FaSTrack using Hamilton-Jacobi reachability for precomputation and three different real-time trajectory planners with three different tracking-planning model pairs.