 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructural Design Through Reinforcement Learning
Jul 10, 2024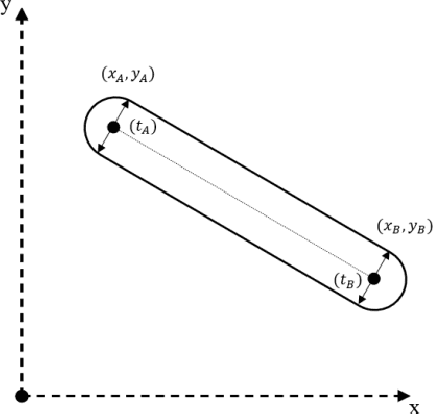
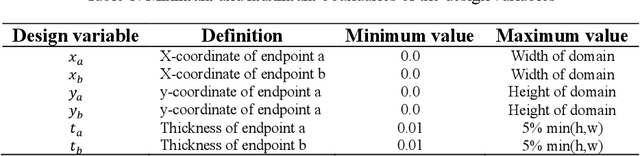
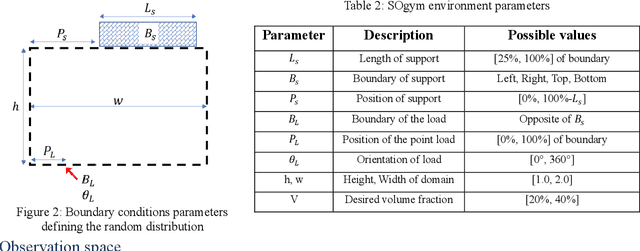
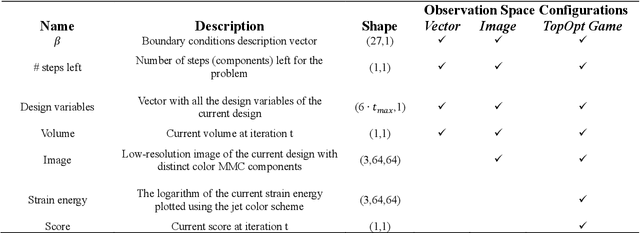
This paper introduces the Structural Optimization gym (SOgym), a novel open-source reinforcement learning environment designed to advance the application of machine learning in topology optimization. SOgym aims for RL agents to learn to generate physically viable and structurally robust designs by integrating the physics of TO directly into the reward function. To enhance scalability, SOgym leverages feature mapping methods as a mesh-independent interface between the environment and the agent, allowing for efficient interaction with the design variables regardless of the mesh resolution. Baseline results are presented using a model-free proximal policy optimization agent and a model-based DreamerV3 agent. Three observation space configurations were tested. The TopOpt game inspired configuration, an interactive educational tool that improves students' intuition in designing structures to minimize compliance under volume constraints, performed best in terms of performance and sample efficiency. The 100M parameter version of DreamerV3 produced structures within 54% of the baseline compliance achieved by traditional optimization methods as well as a 0% disconnection rate, an improvement over supervised learning approaches that often struggle with disconnected load paths. When comparing the learning rates of the agents to those of engineering students from the TopOpt game experiment, the DreamerV3-100M model shows a learning rate approximately four orders of magnitude lower, an impressive feat for a policy trained from scratch through trial and error. These results suggest RL's potential to solve continuous TO problems and its capacity to explore and learn from diverse design solutions. SOgym provides a platform for developing RL agents for complex structural design challenges and is publicly available to support further research in the field.
From Density to Geometry: YOLOv8 Instance Segmentation for Reverse Engineering of Optimized Structures
Apr 29, 2024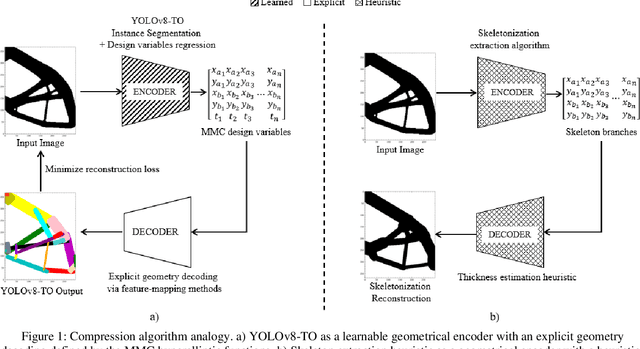
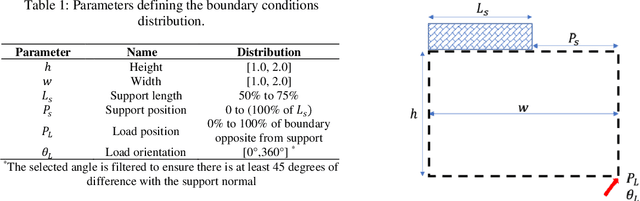
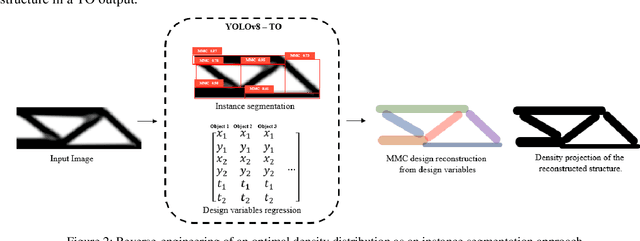
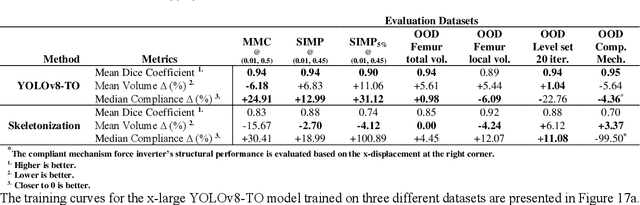
This paper introduces YOLOv8-TO, a novel approach for reverse engineering of topology-optimized structures into interpretable geometric parameters using the YOLOv8 instance segmentation model. Density-based topology optimization methods require post-processing to convert the optimal density distribution into a parametric representation for design exploration and integration with CAD tools. Traditional methods such as skeletonization struggle with complex geometries and require manual intervention. YOLOv8-TO addresses these challenges by training a custom YOLOv8 model to automatically detect and reconstruct structural components from binary density distributions. The model is trained on a diverse dataset of both optimized and random structures generated using the Moving Morphable Components method. A custom reconstruction loss function based on the dice coefficient of the predicted geometry is used to train the new regression head of the model via self-supervised learning. The method is evaluated on test sets generated from different topology optimization methods, including out-of-distribution samples, and compared against a skeletonization approach. Results show that YOLOv8-TO significantly outperforms skeletonization in reconstructing visually and structurally similar designs. The method showcases an average improvement of 13.84% in the Dice coefficient, with peak enhancements reaching 20.78%. The method demonstrates good generalization to complex geometries and fast inference times, making it suitable for integration into design workflows using regular workstations. Limitations include the sensitivity to non-max suppression thresholds. YOLOv8-TO represents a significant advancement in topology optimization post-processing, enabling efficient and accurate reverse engineering of optimized structures for design exploration and manufacturing.
An Attention-Based Deep Learning Architecture for Real-Time Monocular Visual Odometry: Applications to GPS-free Drone Navigation
Apr 27, 2024Drones are increasingly used in fields like industry, medicine, research, disaster relief, defense, and security. Technical challenges, such as navigation in GPS-denied environments, hinder further adoption. Research in visual odometry is advancing, potentially solving GPS-free navigation issues. Traditional visual odometry methods use geometry-based pipelines which, while popular, often suffer from error accumulation and high computational demands. Recent studies utilizing deep neural networks (DNNs) have shown improved performance, addressing these drawbacks. Deep visual odometry typically employs convolutional neural networks (CNNs) and sequence modeling networks like recurrent neural networks (RNNs) to interpret scenes and deduce visual odometry from video sequences. This paper presents a novel real-time monocular visual odometry model for drones, using a deep neural architecture with a self-attention module. It estimates the ego-motion of a camera on a drone, using consecutive video frames. An inference utility processes the live video feed, employing deep learning to estimate the drone's trajectory. The architecture combines a CNN for image feature extraction and a long short-term memory (LSTM) network with a multi-head attention module for video sequence modeling. Tested on two visual odometry datasets, this model converged 48% faster than a previous RNN model and showed a 22% reduction in mean translational drift and a 12% improvement in mean translational absolute trajectory error, demonstrating enhanced robustness to noise.
Semi-Synthetic Dataset Augmentation for Application-Specific Gaze Estimation
Oct 27, 2023Although the number of gaze estimation datasets is growing, the application of appearance-based gaze estimation methods is mostly limited to estimating the point of gaze on a screen. This is in part because most datasets are generated in a similar fashion, where the gaze target is on a screen close to camera's origin. In other applications such as assistive robotics or marketing research, the 3D point of gaze might not be close to the camera's origin, meaning models trained on current datasets do not generalize well to these tasks. We therefore suggest generating a textured tridimensional mesh of the face and rendering the training images from a virtual camera at a specific position and orientation related to the application as a mean of augmenting the existing datasets. In our tests, this lead to an average 47% decrease in gaze estimation angular error.
Development of Machine learning algorithms to identify the Cobb angle in adolescents with idiopathic scoliosis based on lumbosacral joint efforts during gait (Case study)
Jan 29, 2023Objectives: To quantify the magnitude of spinal deformity in adolescent idiopathic scoliosis (AIS), the Cobb angle is measured on X-ray images of the spine. Continuous exposure to X-ray radiation to follow-up the progression of scoliosis may lead to negative side effects on patients. Furthermore, manual measurement of the Cobb angle could lead to up to 10{\deg} or more of a difference due to intra/inter observer variation. Therefore, the objective of this study is to identify the Cobb angle by developing an automated radiation-free model, using Machine learning algorithms. Methods: Thirty participants with lumbar/thoracolumbar AIS (15{\deg} < Cobb angle < 66{\deg}) performed gait cycles. The lumbosacral (L5-S1) joint efforts during six gait cycles of participants were used as features to feed training algorithms. Various regression algorithms were implemented and run. Results: The decision tree regression algorithm achieved the best result with the mean absolute error equal to 4.6{\deg} of averaged 10-fold cross-validation. Conclusions: This study shows that the lumbosacral joint efforts during gait as radiation-free data are capable to identify the Cobb angle by using Machine learning algorithms. The proposed model can be considered as an alternative, radiation-free method to X-ray radiography to assist clinicians in following-up the progression of AIS.
A Test Bench For Evaluating Exoskeletons For Upper Limb Rehabilitation
Dec 30, 2021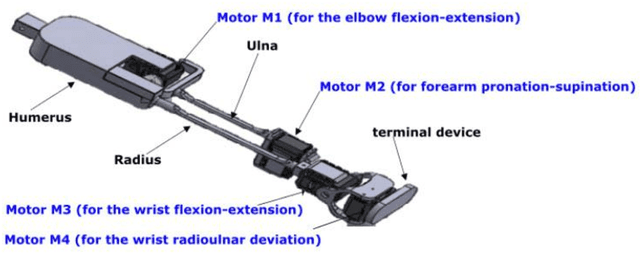
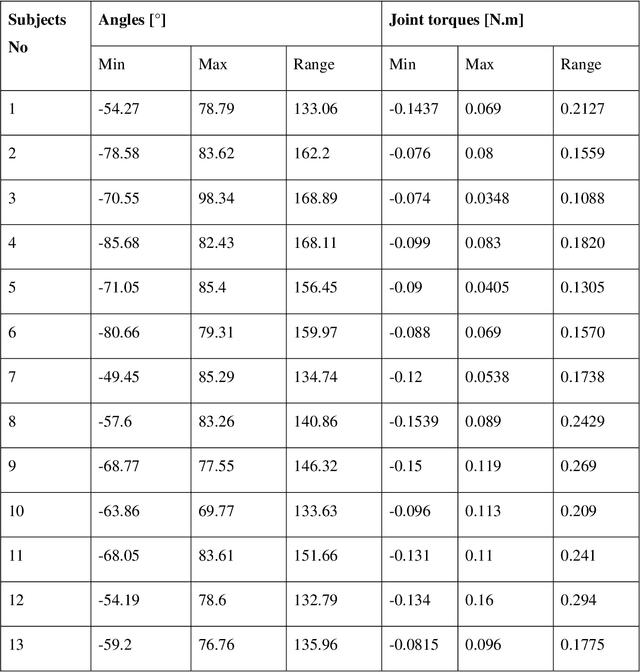
The potential of wearable robotics technology is undeniable. However, quantifying its value is difficult. Various types of exoskeleton robots have already been developed and tested for upper limb rehabilitation but, evaluations are not standardized, particularly in pediatric rehabilitation. This paper proposes a methodology for the quantitative evaluation of upper limb exoskeletons that, like a test bench, would serve for replicable testing. We determined the range of motion (ROM) and joint torques using both kinematic modeling and experimental measurements (using sensors integrated into Dynamixel actuators). The proposed test bench can provide an accurate range of motion (ROM) and joint torques during the pronation-supination (PS) task. The range of motion obtained with the physical prototype was approximately 156.26 +- 4.71{\deg} during the PS task, while it was approximately 146.84 +- 14.32{\deg} for the multibody model. The results show that the average range of experimental torques (0.28 +- 0.06 N.m) was overestimated by 40% and just 3.4%, respectively, when compared to the average range of simulated torques (0.2 +- 0.05 N.m) and to the highest range of simulated torques (0.29 N.m). For the experimental measurements, test-retest reliability was excellent (0.96-0.98) within sessions and excellent (0.93) or good (0.81-0.86) between sessions. Finally, the suggested approach provides a ROM close to the normal ROM necessary during PS tasks. These results validate the measurements' accuracy and underline the proposed methodology's relevance. The proposed test bench could become a reference standard for evaluating exoskeletons. This study also addresses a methodological aspect on the accurate assessment of joint torques that can serve in applications such as the sizing of actuators in exoskeletons or the non-invasive evaluation of muscle forces in the human body.
A Fuzzy-based Framework to Support Multicriteria Design of Mechatronic Systems
Jun 14, 2020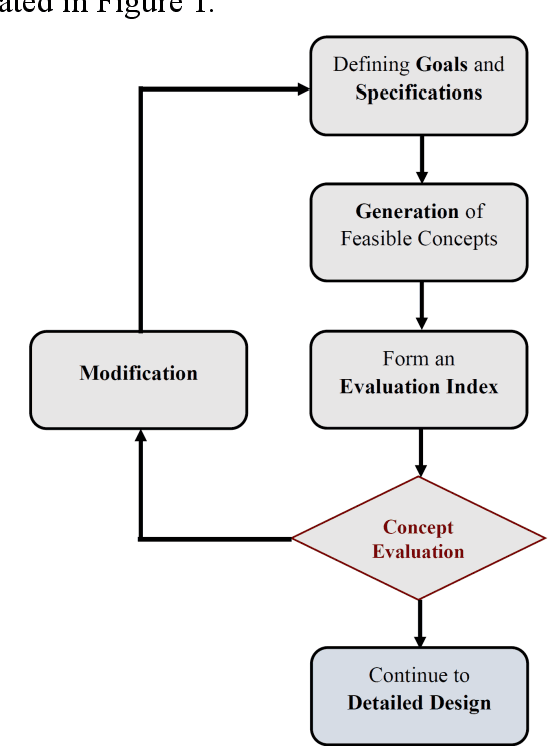
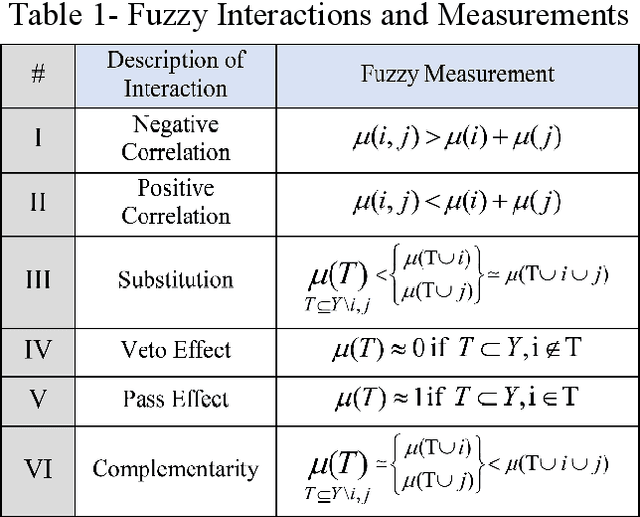
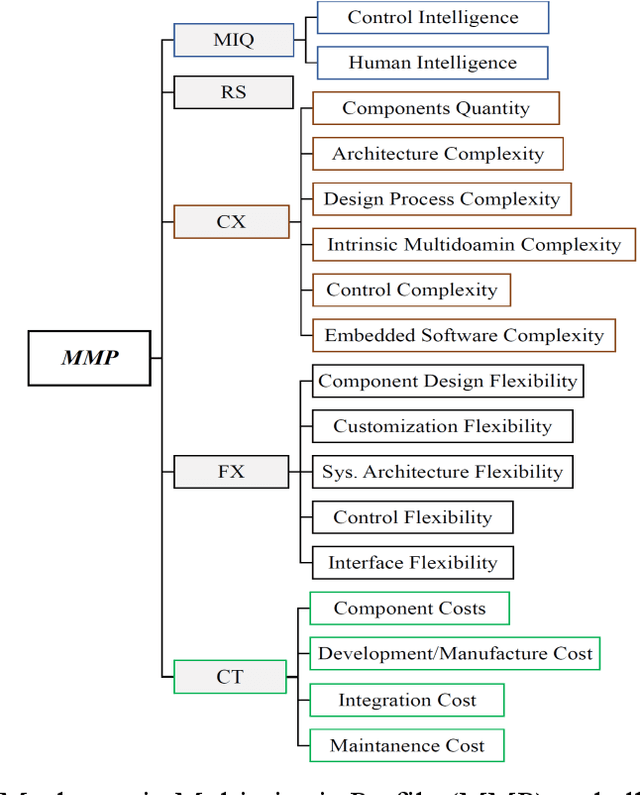
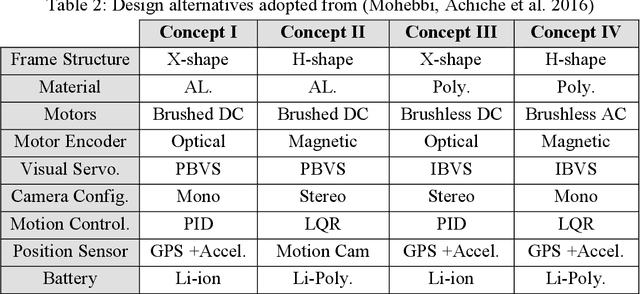
Designing a mechatronic system is a complex task since it deals with a high number of system components with multi-disciplinary nature in the presence of interacting design objectives. Currently, the sequential design is widely used by designers in industries that deal with different domains and their corresponding design objectives separately leading to a functional but not necessarily an optimal result. Consequently, the need for a systematic and multi-objective design methodology arises. A new conceptual design approach based on a multi-criteria profile for mechatronic systems has been previously presented by the authors which uses a series of nonlinear fuzzy-based aggregation functions to facilitate decision-making for design evaluation in the presence of interacting criteria. Choquet fuzzy integrals are one of the most expressive and reliable preference models used in decision theory for multicriteria decision making. They perform a weighted aggregation by the means of fuzzy measures assigning a weight to any coalition of criteria. This enables the designers to model importance and also interactions among criteria thus covering an important range of possible decision outcomes. However, specification of the fuzzy measures involves many parameters and is very difficult when only relying on the designer's intuition. In this paper, we discuss three different methods of fuzzy measure identification tailored for a mechatronic design process and exemplified by a case study of designing a vision-guided quadrotor drone. The results obtained from each method are discussed in the end.
Improving Convolutional Neural Networks Via Conservative Field Regularisation and Integration
Mar 11, 2020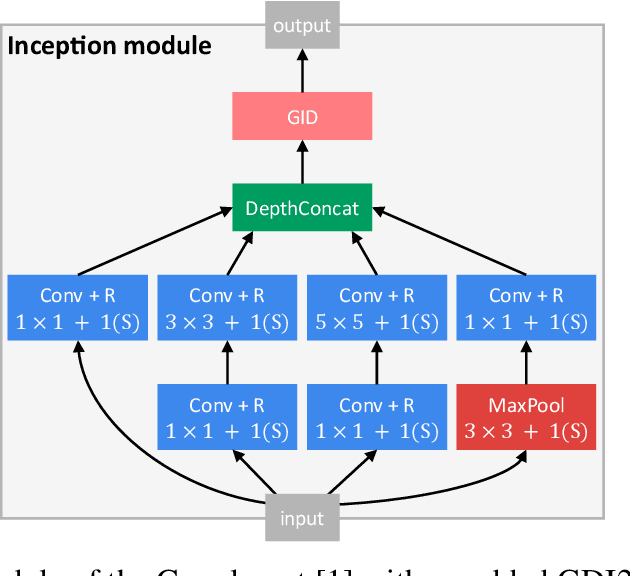
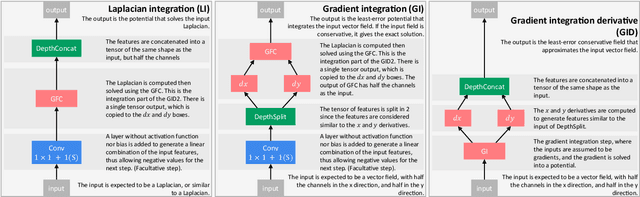
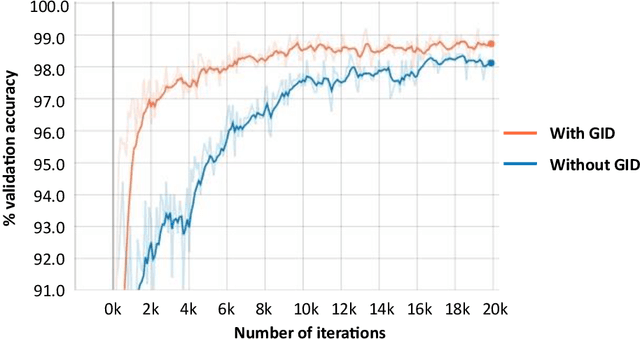
Current research in convolutional neural networks (CNN) focuses mainly on changing the architecture of the networks, optimizing the hyper-parameters and improving the gradient descent. However, most work use only 3 standard families of operations inside the CNN, the convolution, the activation function, and the pooling. In this work, we propose a new family of operations based on the Green's function of the Laplacian, which allows the network to solve the Laplacian, to integrate any vector field and to regularize the field by forcing it to be conservative. Hence, the Green's function (GF) is the first operation that regularizes the 2D or 3D feature space by forcing it to be conservative and physically interpretable, instead of regularizing the norm of the weights. Our results show that such regularization allows the network to learn faster, to have smoother training curves and to better generalize, without any additional parameter. The current manuscript presents early results, more work is required to benchmark the proposed method.
Saliency Enhancement using Gradient Domain Edges Merging
Feb 11, 2020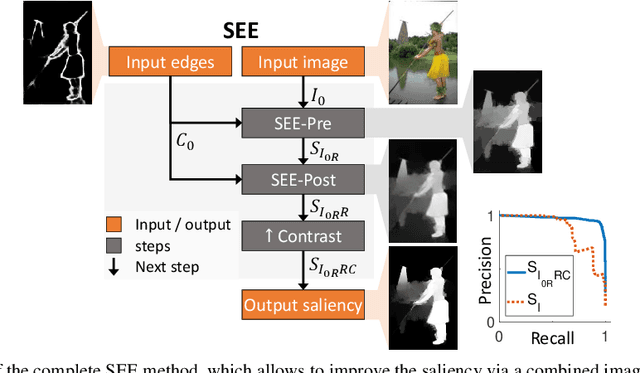
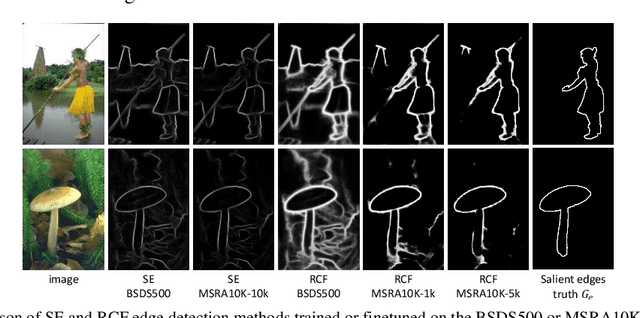
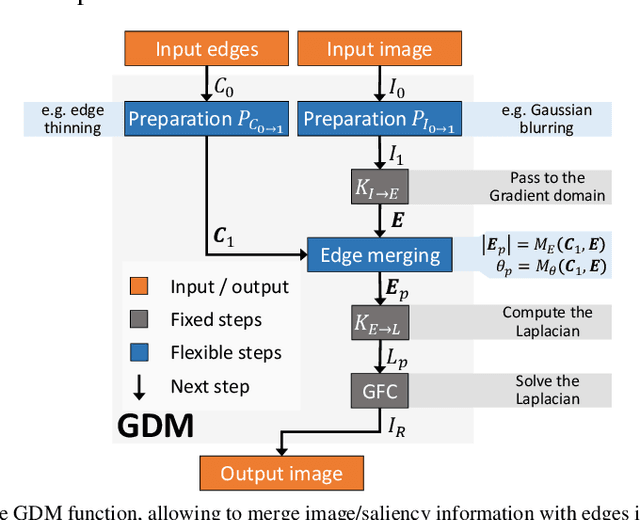
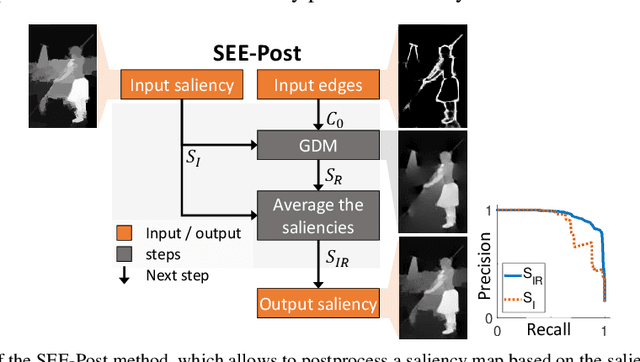
In recent years, there has been a rapid progress in solving the binary problems in computer vision, such as edge detection which finds the boundaries of an image and salient object detection which finds the important object in an image. This progress happened thanks to the rise of deep-learning and convolutional neural networks (CNN) which allow to extract complex and abstract features. However, edge detection and saliency are still two different fields and do not interact together, although it is intuitive for a human to detect salient objects based on its boundaries. Those features are not well merged in a CNN because edges and surfaces do not intersect since one feature represents a region while the other represents boundaries between different regions. In the current work, the main objective is to develop a method to merge the edges with the saliency maps to improve the performance of the saliency. Hence, we developed the gradient-domain merging (GDM) which can be used to quickly combine the image-domain information of salient object detection with the gradient-domain information of the edge detection. This leads to our proposed saliency enhancement using edges (SEE) with an average improvement of the F-measure of at least 3.4 times higher on the DUT-OMRON dataset and 6.6 times higher on the ECSSD dataset, when compared to competing algorithm such as denseCRF and BGOF. The SEE algorithm is split into 2 parts, SEE-Pre for preprocessing and SEE-Post pour postprocessing.
Design of an assistive trunk exoskeleton based on multibody dynamic modelling
Oct 02, 2019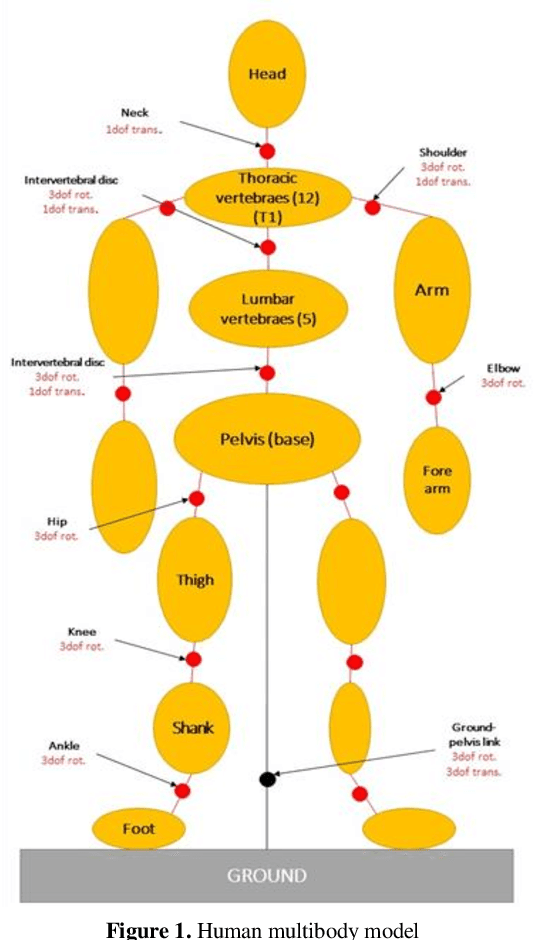
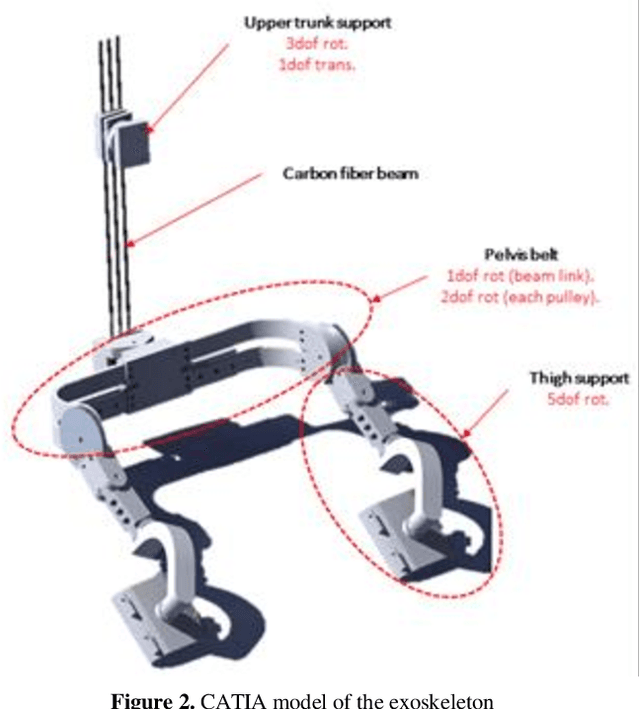
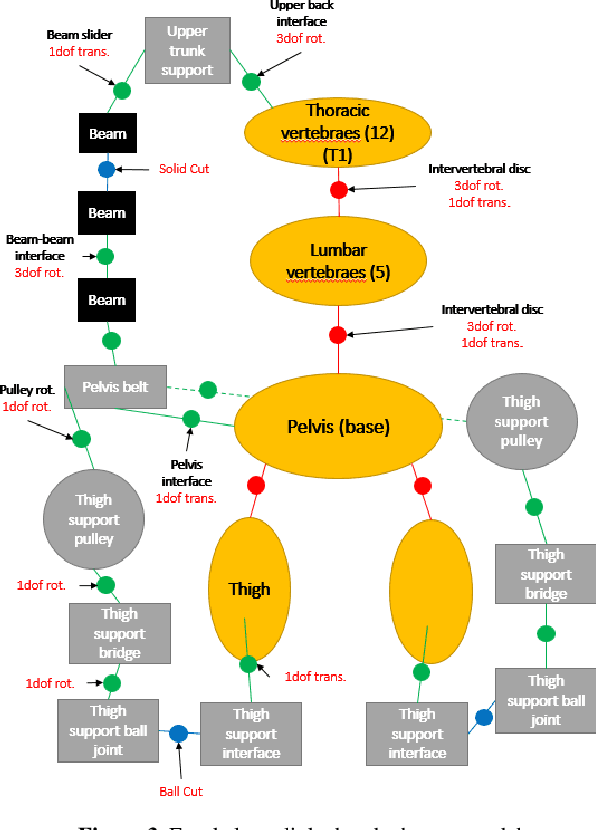
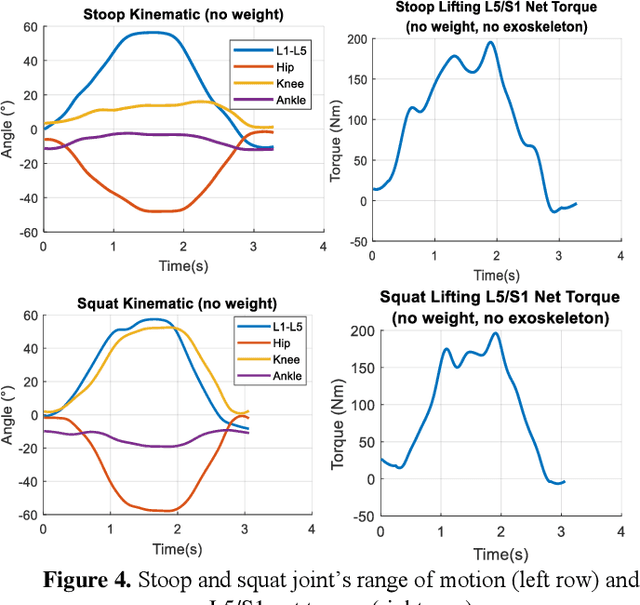
Low back pain is one of the most common musculoskeletal disorder. To reduce its incidences, some back exoskeletons have been designed and already commercialized. However, there is a gap between the phases of device and testing on subjects. In fact, the main unsolved problem is the lack of realistic simulation of human-device interaction. Consequently, the objective of this paper is to design a 3D multibody model of the human body that includes the full thoracic and lumbar spine combined with a low back exoskeleton, enabling to analyze the interactions between them. The results highlight that the use of the exoskeleton reduces the net torque in the lower lumbar spine but creates normal forces transmitted through the thighs and the pelvis, which should also be considered for low back pain. As a perspective, this model would enable to redesign low back exoskeletons reducing both torques and forces in the human joints in a realistic dynamic context.