 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Test Bench For Evaluating Exoskeletons For Upper Limb Rehabilitation
Paper and Code
Dec 30, 2021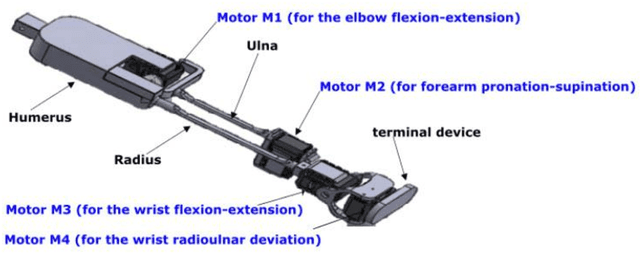
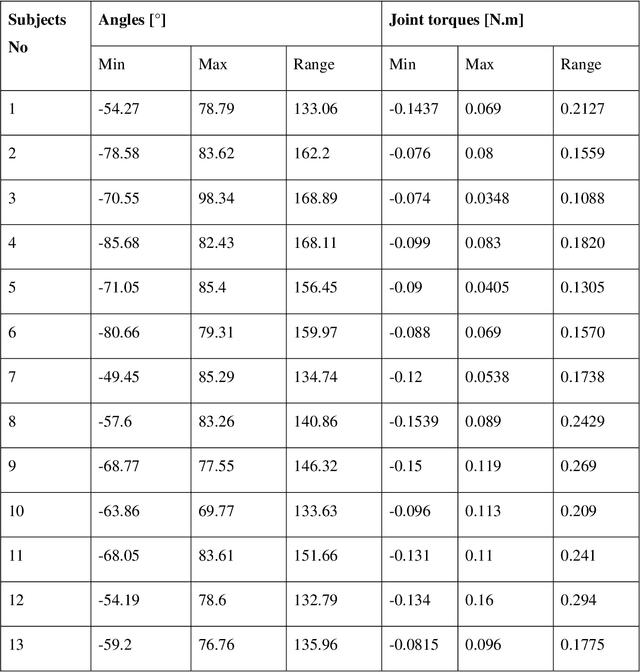
The potential of wearable robotics technology is undeniable. However, quantifying its value is difficult. Various types of exoskeleton robots have already been developed and tested for upper limb rehabilitation but, evaluations are not standardized, particularly in pediatric rehabilitation. This paper proposes a methodology for the quantitative evaluation of upper limb exoskeletons that, like a test bench, would serve for replicable testing. We determined the range of motion (ROM) and joint torques using both kinematic modeling and experimental measurements (using sensors integrated into Dynamixel actuators). The proposed test bench can provide an accurate range of motion (ROM) and joint torques during the pronation-supination (PS) task. The range of motion obtained with the physical prototype was approximately 156.26 +- 4.71{\deg} during the PS task, while it was approximately 146.84 +- 14.32{\deg} for the multibody model. The results show that the average range of experimental torques (0.28 +- 0.06 N.m) was overestimated by 40% and just 3.4%, respectively, when compared to the average range of simulated torques (0.2 +- 0.05 N.m) and to the highest range of simulated torques (0.29 N.m). For the experimental measurements, test-retest reliability was excellent (0.96-0.98) within sessions and excellent (0.93) or good (0.81-0.86) between sessions. Finally, the suggested approach provides a ROM close to the normal ROM necessary during PS tasks. These results validate the measurements' accuracy and underline the proposed methodology's relevance. The proposed test bench could become a reference standard for evaluating exoskeletons. This study also addresses a methodological aspect on the accurate assessment of joint torques that can serve in applications such as the sizing of actuators in exoskeletons or the non-invasive evaluation of muscle forces in the human body.