 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fuzzy-based Framework to Support Multicriteria Design of Mechatronic Systems
Paper and Code
Jun 14, 2020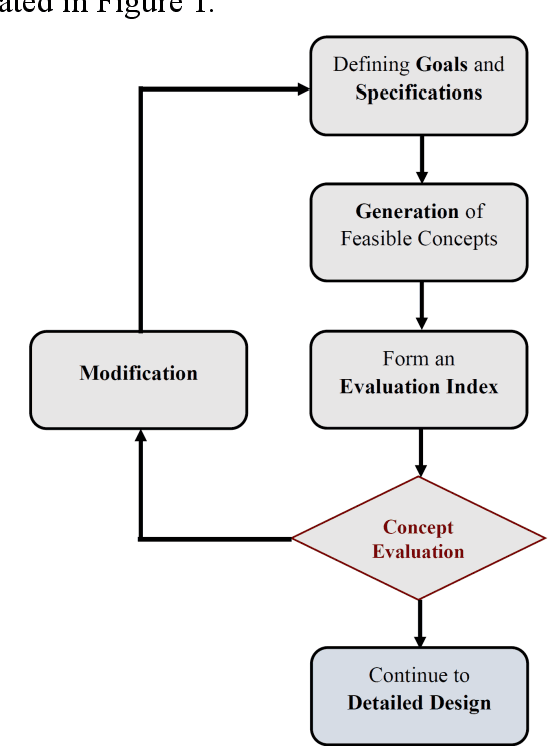
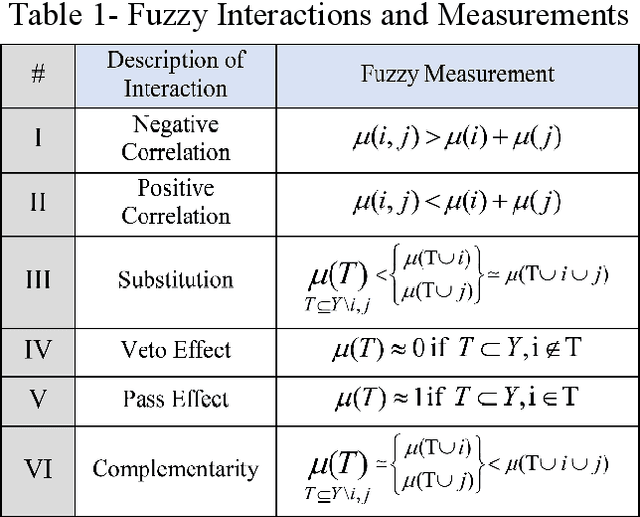
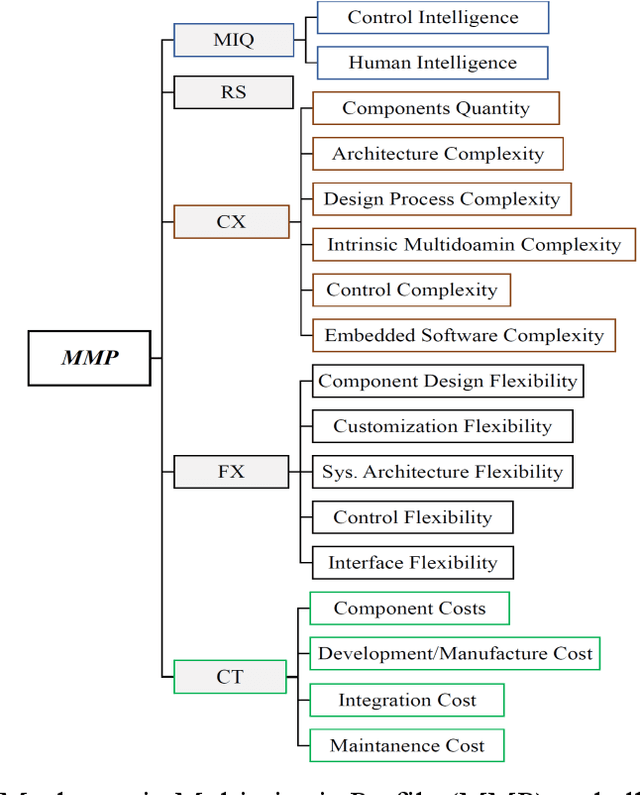
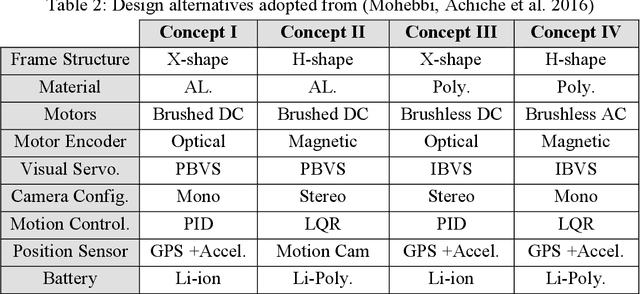
Designing a mechatronic system is a complex task since it deals with a high number of system components with multi-disciplinary nature in the presence of interacting design objectives. Currently, the sequential design is widely used by designers in industries that deal with different domains and their corresponding design objectives separately leading to a functional but not necessarily an optimal result. Consequently, the need for a systematic and multi-objective design methodology arises. A new conceptual design approach based on a multi-criteria profile for mechatronic systems has been previously presented by the authors which uses a series of nonlinear fuzzy-based aggregation functions to facilitate decision-making for design evaluation in the presence of interacting criteria. Choquet fuzzy integrals are one of the most expressive and reliable preference models used in decision theory for multicriteria decision making. They perform a weighted aggregation by the means of fuzzy measures assigning a weight to any coalition of criteria. This enables the designers to model importance and also interactions among criteria thus covering an important range of possible decision outcomes. However, specification of the fuzzy measures involves many parameters and is very difficult when only relying on the designer's intuition. In this paper, we discuss three different methods of fuzzy measure identification tailored for a mechatronic design process and exemplified by a case study of designing a vision-guided quadrotor drone. The results obtained from each method are discussed in the end.