 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Analysis of Autonomous Railway Systems: An Introduction to the SACRED Methodology
Mar 18, 2024



As the railway industry increasingly seeks to introduce autonomy and machine learning (ML), several questions arise. How can safety be assured for such systems and technologies? What is the applicability of current safety standards within this new technological landscape? What are the key metrics to classify a system as safe? Currently, safety analysis for the railway reflects the failure modes of existing technology; in contrast, the primary concern of analysis of automation is typically average performance. Such purely statistical approaches to measuring ML performance are limited, as they may overlook classes of situations that may occur rarely but in which the function performs consistently poorly. To combat these difficulties we introduce SACRED, a safety methodology for producing an initial safety case and determining important safety metrics for autonomous systems. The development of SACRED is motivated by the proposed GoA-4 light-rail system in Berlin.
Safeguarding Learning-based Control for Smart Energy Systems with Sampling Specifications
Aug 11, 2023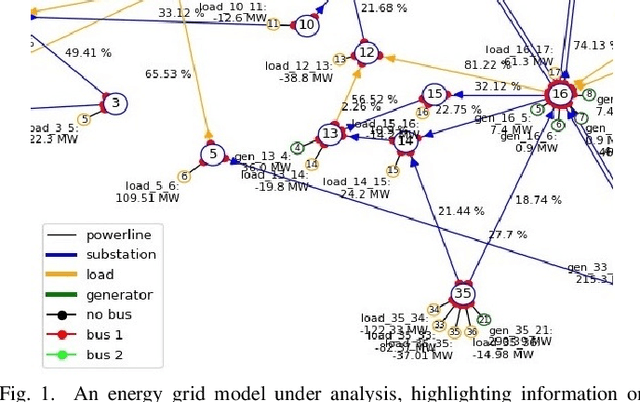
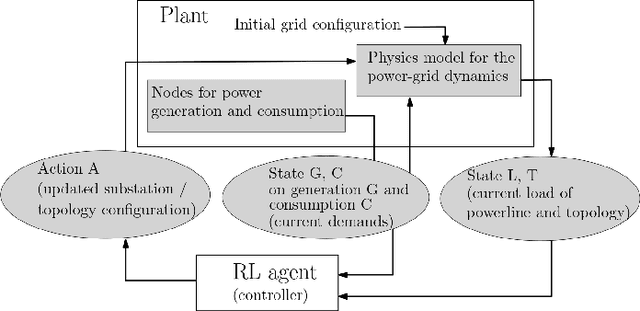
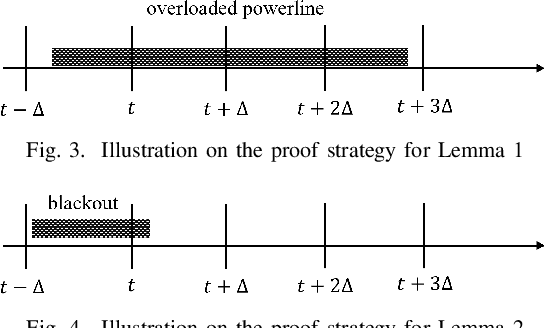
We study challenges using reinforcement learning in controlling energy systems, where apart from performance requirements, one has additional safety requirements such as avoiding blackouts. We detail how these safety requirements in real-time temporal logic can be strengthened via discretization into linear temporal logic (LTL), such that the satisfaction of the LTL formulae implies the satisfaction of the original safety requirements. The discretization enables advanced engineering methods such as synthesizing shields for safe reinforcement learning as well as formal verification, where for statistical model checking, the probabilistic guarantee acquired by LTL model checking forms a lower bound for the satisfaction of the original real-time safety requirements.
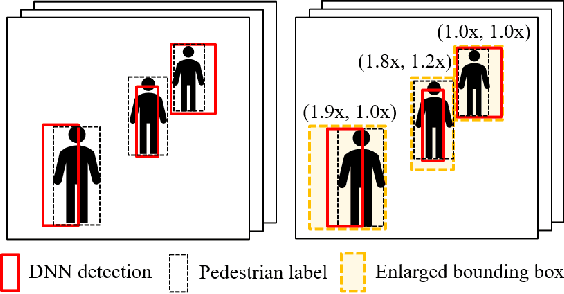
Unaligned but Safe -- Formally Compensating Performance Limitations for Imprecise 2D Object Detection
Feb 10, 2022



In this paper, we consider the imperfection within machine learning-based 2D object detection and its impact on safety. We address a special sub-type of performance limitations: the prediction bounding box cannot be perfectly aligned with the ground truth, but the computed Intersection-over-Union metric is always larger than a given threshold. Under such type of performance limitation, we formally prove the minimum required bounding box enlargement factor to cover the ground truth. We then demonstrate that the factor can be mathematically adjusted to a smaller value, provided that the motion planner takes a fixed-length buffer in making its decisions. Finally, observing the difference between an empirically measured enlargement factor and our formally derived worst-case enlargement factor offers an interesting connection between the quantitative evidence (demonstrated by statistics) and the qualitative evidence (demonstrated by worst-case analysis).
Safe AI -- How is this Possible?
Jan 25, 2022


Ttraditional safety engineering is coming to a turning point moving from deterministic, non-evolving systems operating in well-defined contexts to increasingly autonomous and learning-enabled AI systems which are acting in largely unpredictable operating contexts. We outline some of underlying challenges of safe AI and suggest a rigorous engineering framework for minimizing uncertainty, thereby increasing confidence, up to tolerable levels, in the safe behavior of AI systems.
A causal model of safety assurance for machine learning
Jan 14, 2022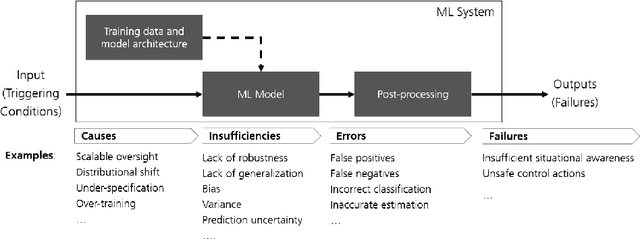
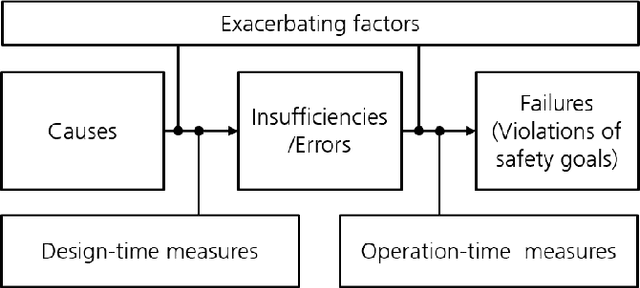

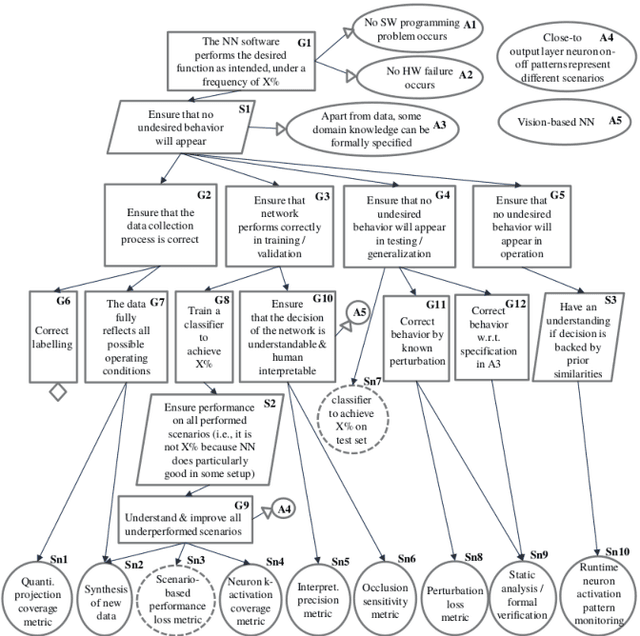
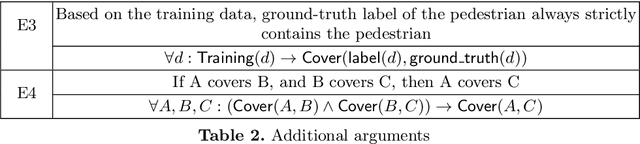
This paper proposes a framework based on a causal model of safety upon which effective safety assurance cases for ML-based applications can be built. In doing so, we build upon established principles of safety engineering as well as previous work on structuring assurance arguments for ML. The paper defines four categories of safety case evidence and a structured analysis approach within which these evidences can be effectively combined. Where appropriate, abstract formalisations of these contributions are used to illustrate the causalities they evaluate, their contributions to the safety argument and desirable properties of the evidences. Based on the proposed framework, progress in this area is re-evaluated and a set of future research directions proposed in order for tangible progress in this field to be made.
Logically Sound Arguments for the Effectiveness of ML Safety Measures
Nov 04, 2021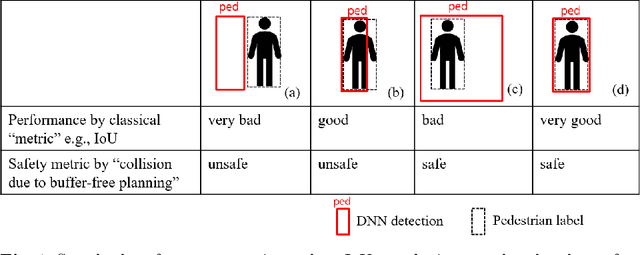
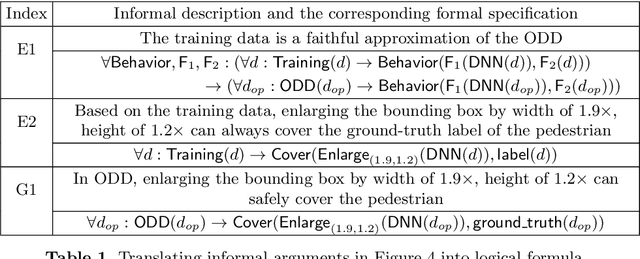
We investigate the issues of achieving sufficient rigor in the arguments for the safety of machine learning functions. By considering the known weaknesses of DNN-based 2D bounding box detection algorithms, we sharpen the metric of imprecise pedestrian localization by associating it with the safety goal. The sharpening leads to introducing a conservative post-processor after the standard non-max-suppression as a counter-measure. We then propose a semi-formal assurance case for arguing the effectiveness of the post-processor, which is further translated into formal proof obligations for demonstrating the soundness of the arguments. Applying theorem proving not only discovers the need to introduce missing claims and mathematical concepts but also reveals the limitation of Dempster-Shafer's rules used in semi-formal argumentation.