 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterizing Behavioral Differences and Adaptations of Automated Vehicles and Human Drivers at Unsignalized Intersections: Insights from Waymo and Lyft Open Datasets
Oct 16, 2024The integration of autonomous vehicles (AVs) into transportation systems presents an unprecedented opportunity to enhance road safety and efficiency. However, understanding the interactions between AVs and human-driven vehicles (HVs) at intersections remains an open research question. This study aims to bridge this gap by examining behavioral differences and adaptations of AVs and HVs at unsignalized intersections by utilizing two comprehensive AV datasets from Waymo and Lyft. Using a systematic methodology, the research identifies and analyzes merging and crossing conflicts by calculating key safety and efficiency metrics, including time to collision (TTC), post-encroachment time (PET), maximum required deceleration (MRD), time advantage (TA), and speed and acceleration profiles. The findings reveal a paradox in mixed traffic flow: while AVs maintain larger safety margins, their conservative behavior can lead to unexpected situations for human drivers, potentially causing unsafe conditions. From a performance point of view, human drivers exhibit more consistent behavior when interacting with AVs versus other HVs, suggesting AVs may contribute to harmonizing traffic flow patterns. Moreover, notable differences were observed between Waymo and Lyft vehicles, which highlights the importance of considering manufacturer-specific AV behaviors in traffic modeling and management strategies for the safe integration of AVs. The processed dataset utilized in this study is openly published to foster the research on AV-HV interactions.
A Systematic Review of Edge Case Detection in Automated Driving: Methods, Challenges and Future Directions
Oct 11, 2024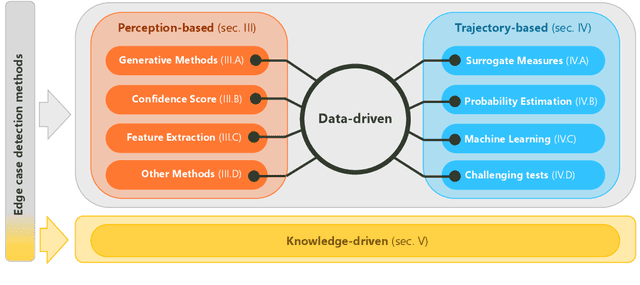
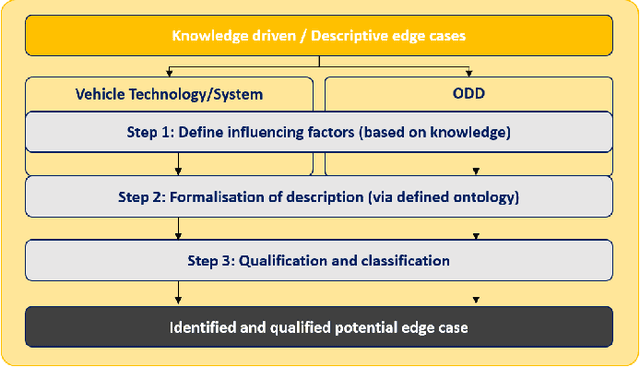
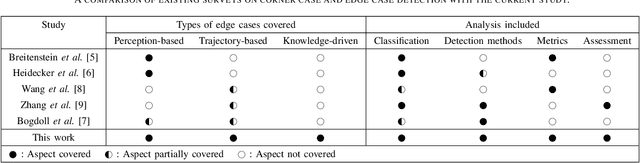
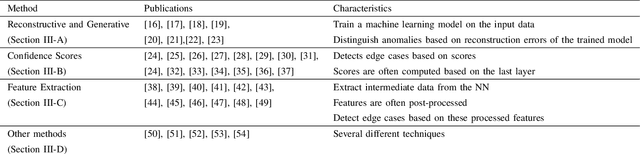
The rapid development of automated vehicles (AVs) promises to revolutionize transportation by enhancing safety and efficiency. However, ensuring their reliability in diverse real-world conditions remains a significant challenge, particularly due to rare and unexpected situations known as edge cases. Although numerous approaches exist for detecting edge cases, there is a notable lack of a comprehensive survey that systematically reviews these techniques. This paper fills this gap by presenting a practical, hierarchical review and systematic classification of edge case detection and assessment methodologies. Our classification is structured on two levels: first, categorizing detection approaches according to AV modules, including perception-related and trajectory-related edge cases; and second, based on underlying methodologies and theories guiding these techniques. We extend this taxonomy by introducing a new class called "knowledge-driven" approaches, which is largely overlooked in the literature. Additionally, we review the techniques and metrics for the evaluation of edge case detection methods and identified edge cases. To our knowledge, this is the first survey to comprehensively cover edge case detection methods across all AV subsystems, discuss knowledge-driven edge cases, and explore evaluation techniques for detection methods. This structured and multi-faceted analysis aims to facilitate targeted research and modular testing of AVs. Moreover, by identifying the strengths and weaknesses of various approaches and discussing the challenges and future directions, this survey intends to assist AV developers, researchers, and policymakers in enhancing the safety and reliability of automated driving (AD) systems through effective edge case detection.
A unified theory and statistical learning approach for traffic conflict detection
Jul 15, 2024



This study proposes a unified theory and statistical learning approach for traffic conflict detection, addressing the long-existing call for a consistent and comprehensive methodology to evaluate the collision risk emerged in road user interactions. The proposed theory assumes a context-dependent probabilistic collision risk and frames conflict detection as estimating the risk by statistical learning from observed proximities and contextual variables. Three primary tasks are integrated: representing interaction context from selected observables, inferring proximity distributions in different contexts, and applying extreme value theory to relate conflict intensity with conflict probability. As a result, this methodology is adaptable to various road users and interaction scenarios, enhancing its applicability without the need for pre-labelled conflict data. Demonstration experiments are executed using real-world trajectory data, with the unified metric trained on lane-changing interactions on German highways and applied to near-crash events from the 100-Car Naturalistic Driving Study in the U.S. The experiments demonstrate the methodology's ability to provide effective collision warnings, generalise across different datasets and traffic environments, cover a broad range of conflicts, and deliver a long-tailed distribution of conflict intensity. This study contributes to traffic safety by offering a consistent and explainable methodology for conflict detection applicable across various scenarios. Its societal implications include enhanced safety evaluations of traffic infrastructures, more effective collision warning systems for autonomous and driving assistance systems, and a deeper understanding of road user behaviour in different traffic conditions, contributing to a potential reduction in accident rates and improving overall traffic safety.
Pattern retrieval of traffic congestion using graph-based associations of traffic domain-specific features
Nov 28, 2023



The fast-growing amount of traffic data brings many opportunities for revealing more insightful information about traffic dynamics. However, it also demands an effective database management system in which information retrieval is arguably an important feature. The ability to locate similar patterns in big datasets potentially paves the way for further valuable analyses in traffic management. This paper proposes a content-based retrieval system for spatiotemporal patterns of highway traffic congestion. There are two main components in our framework, namely pattern representation and similarity measurement. To effectively interpret retrieval outcomes, the paper proposes a graph-based approach (relation-graph) for the former component, in which fundamental traffic phenomena are encoded as nodes and their spatiotemporal relationships as edges. In the latter component, the similarities between congestion patterns are customizable with various aspects according to user expectations. We evaluated the proposed framework by applying it to a dataset of hundreds of patterns with various complexities (temporally and spatially). The example queries indicate the effectiveness of the proposed method, i.e. the obtained patterns present similar traffic phenomena as in the given examples. In addition, the success of the proposed approach directly derives a new opportunity for semantic retrieval, in which expected patterns are described by adopting the relation-graph notion to associate fundamental traffic phenomena.
A Comparative Conflict Resolution Dataset Derived from Argoverse-2: Scenarios with vs. without Autonomous Vehicles
Aug 26, 2023As the deployment of autonomous vehicles (AVs) becomes increasingly prevalent, ensuring safe and smooth interactions between AVs and other human agents is of critical importance. In the urban environment, how vehicles resolve conflicts has significant impacts on both driving safety and traffic efficiency. To expedite the studies on evaluating conflict resolution in AV-involved and AV-free scenarios at intersections, this paper presents a high-quality dataset derived from the open Argoverse-2 motion forecasting data. First, scenarios of interest are selected by applying a set of heuristic rules regarding post-encroachment time (PET), minimum distance, trajectory crossing, and speed variation. Next, the quality of the raw data is carefully examined. We found that position and speed data are not consistent in Argoverse-2 data and its improper processing induced unnecessary errors. To address these specific problems, we propose and apply a data processing pipeline to correct and enhance the raw data. As a result, 5k+ AV-involved scenarios and 16k+ AV-free scenarios with smooth and consistent position, speed, acceleration, and heading direction data are obtained. Further assessments show that this dataset comprises diverse and balanced conflict resolution regimes. This informative dataset provides a valuable resource for researchers and practitioners in the field of autonomous vehicle assessment and regulation. The dataset is openly available via https://github.com/RomainLITUD/conflict_resolution_dataset.
Identification of Driving Heterogeneity using Action-chains
Jul 31, 2023



Current approaches to identifying driving heterogeneity face challenges in capturing the diversity of driving characteristics and understanding the fundamental patterns from a driving behaviour mechanism standpoint. This study introduces a comprehensive framework for identifying driving heterogeneity from an Action-chain perspective. First, a rule-based segmentation technique that considers the physical meanings of driving behaviour is proposed. Next, an Action phase Library including descriptions of various driving behaviour patterns is created based on the segmentation findings. The Action-chain concept is then introduced by implementing Action phase transition probability, followed by a method for evaluating driving heterogeneity. Employing real-world datasets for evaluation, our approach effectively identifies driving heterogeneity for both individual drivers and traffic flow while providing clear interpretations. These insights can aid the development of accurate driving behaviour theory and traffic flow models, ultimately benefiting traffic performance, and potentially leading to aspects such as improved road capacity and safety.
Large Car-following Data Based on Lyft level-5 Open Dataset: Following Autonomous Vehicles vs. Human-driven Vehicles
May 30, 2023Car-Following (CF), as a fundamental driving behaviour, has significant influences on the safety and efficiency of traffic flow. Investigating how human drivers react differently when following autonomous vs. human-driven vehicles (HV) is thus critical for mixed traffic flow. Research in this field can be expedited with trajectory datasets collected by Autonomous Vehicles (AVs). However, trajectories collected by AVs are noisy and not readily applicable for studying CF behaviour. This paper extracts and enhances two categories of CF data, HV-following-AV (H-A) and HV-following-HV (H-H), from the open Lyft level-5 dataset. First, CF pairs are selected based on specific rules. Next, the quality of raw data is assessed by anomaly analysis. Then, the raw CF data is corrected and enhanced via motion planning, Kalman filtering, and wavelet denoising. As a result, 29k+ H-A and 42k+ H-H car-following segments are obtained, with a total driving distance of 150k+ km. A diversity assessment shows that the processed data cover complete CF regimes for calibrating CF models. This open and ready-to-use dataset provides the opportunity to investigate the CF behaviours of following AVs vs. HVs from real-world data. It can further facilitate studies on exploring the impact of AVs on mixed urban traffic.