 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHomeBench: Evaluating LLMs in Smart Homes with Valid and Invalid Instructions Across Single and Multiple Devices
May 26, 2025Large language models (LLMs) have the potential to revolutionize smart home assistants by enhancing their ability to accurately understand user needs and respond appropriately, which is extremely beneficial for building a smarter home environment. While recent studies have explored integrating LLMs into smart home systems, they primarily focus on handling straightforward, valid single-device operation instructions. However, real-world scenarios are far more complex and often involve users issuing invalid instructions or controlling multiple devices simultaneously. These have two main challenges: LLMs must accurately identify and rectify errors in user instructions and execute multiple user instructions perfectly. To address these challenges and advance the development of LLM-based smart home assistants, we introduce HomeBench, the first smart home dataset with valid and invalid instructions across single and multiple devices in this paper. We have experimental results on 13 distinct LLMs; e.g., GPT-4o achieves only a 0.0% success rate in the scenario of invalid multi-device instructions, revealing that the existing state-of-the-art LLMs still cannot perform well in this situation even with the help of in-context learning, retrieval-augmented generation, and fine-tuning. Our code and dataset are publicly available at https://github.com/BITHLP/HomeBench.
Pole-like Objects Mapping and Long-Term Robot Localization in Dynamic Urban Scenarios
Mar 27, 2021
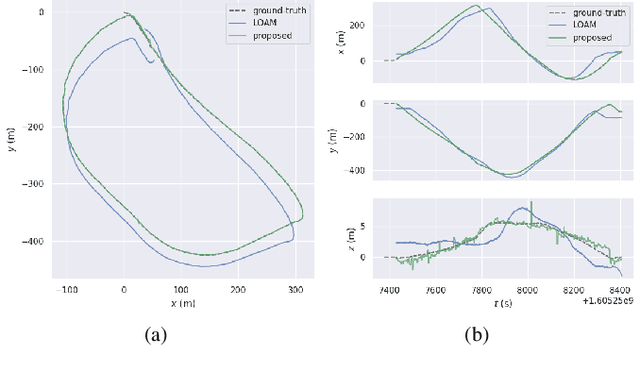

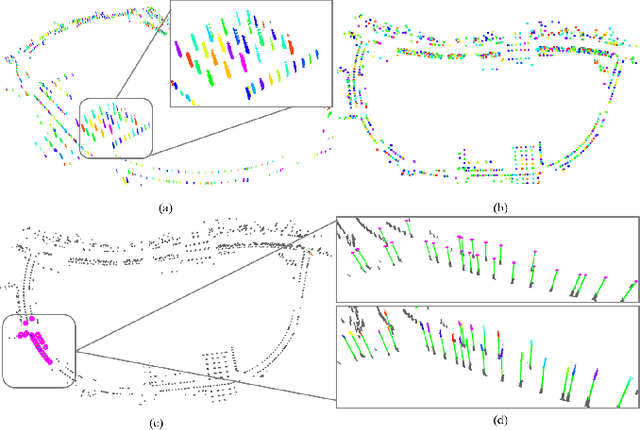
Localization on 3D data is a challenging task for unmanned vehicles, especially in long-term dynamic urban scenarios. Due to the generality and long-term stability, the pole-like objects are very suitable as landmarks for unmanned vehicle localization in time-varing scenarios. In this paper, a long-term LiDAR-only localization algorithm based on semantic cluster map is proposed. At first, the Convolutional Neural Network(CNN) is used to infer the semantics of LiDAR point clouds. Combined with the point cloud segmentation, the long-term static objects pole/trunk in the scene are extracted and registered into a semantic cluster map. When the unmanned vehicle re-enters the environment again, the relocalization is completed by matching the clusters of the local map with the clusters of the global map. Furthermore, the continuous matching between the local and global maps stably outputs the global pose at 2Hz to correct the drift of the 3D LiDAR odometry. The proposed approach realizes localization in the long-term scenarios without maintaining the high-precision point cloud map. The experimental results on our campus dataset demonstrate that the proposed approach performs better in localization accuracy compared with the current state-of-the-art methods. The source of this paper is available at: http://www.github.com/HITSZ-NRSL/long-term-localization.