 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSniffy Bug: A Fully Autonomous Swarm of Gas-Seeking Nano Quadcopters in Cluttered Environments
Jul 12, 2021


Nano quadcopters are ideal for gas source localization (GSL) as they are safe, agile and inexpensive. However, their extremely restricted sensors and computational resources make GSL a daunting challenge. In this work, we propose a novel bug algorithm named `Sniffy Bug', which allows a fully autonomous swarm of gas-seeking nano quadcopters to localize a gas source in an unknown, cluttered and GPS-denied environments. The computationally efficient, mapless algorithm foresees in the avoidance of obstacles and other swarm members, while pursuing desired waypoints. The waypoints are first set for exploration, and, when a single swarm member has sensed the gas, by a particle swarm optimization-based procedure. We evolve all the parameters of the bug (and PSO) algorithm, using our novel simulation pipeline, `AutoGDM'. It builds on and expands open source tools in order to enable fully automated end-to-end environment generation and gas dispersion modeling, allowing for learning in simulation. Flight tests show that Sniffy Bug with evolved parameters outperforms manually selected parameters in cluttered, real-world environments.
Self-supervised Monocular Multi-robot Relative Localization with Efficient Deep Neural Networks
May 26, 2021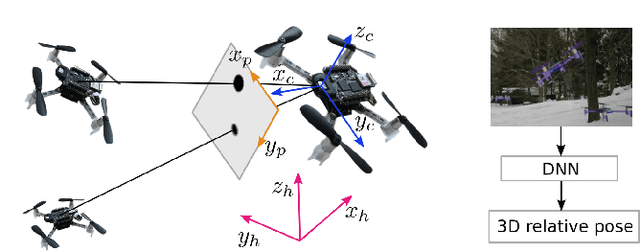


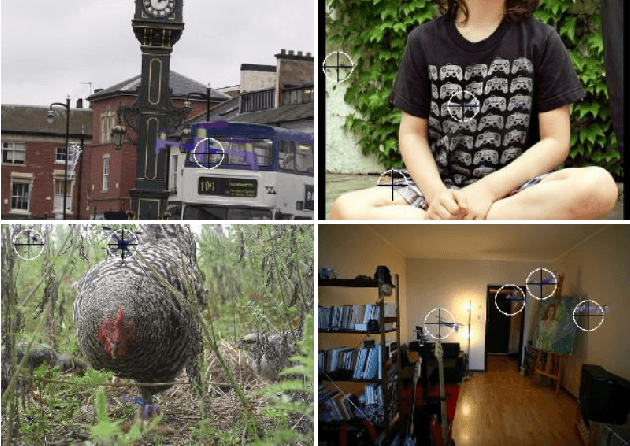
Relative localization is an important ability for multiple robots to perform cooperative tasks. This paper presents a deep neural network (DNN) for monocular relative localization between multiple tiny flying robots. This approach does not require any ground-truth data from external systems or manual labeling. Our system is able to label real-world images with 3D relative positions between robots by another onboard relative estimation technology. After the training from scratch in this self-supervised way, the DNN can predict the relative positions of peer robots by purely using the monocular image. This deep-learning based visual relative localization is scalable, distributed and autonomous. Simulation shows the pipeline for synthetic image generation for multiple robots with Blender and 3D rendering, which allows for preliminary validation of the designed network. Experiments are conducted on two Crazyflie quadrotors for dataset collection with random attitude and velocity. Training and testing of the proposed network on these real-world datasets further validate the self-supervised localization effectiveness in real environment.
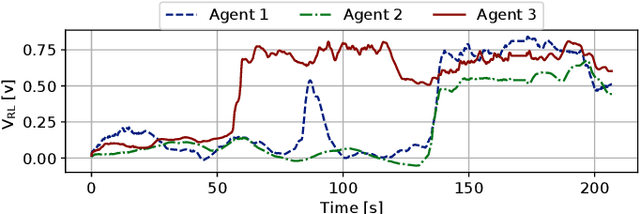
An autonomous swarm of micro flying robots with range-based relative localization
Mar 12, 2020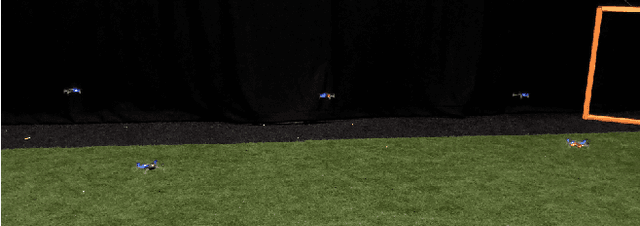
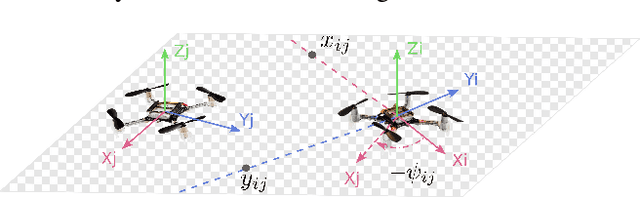
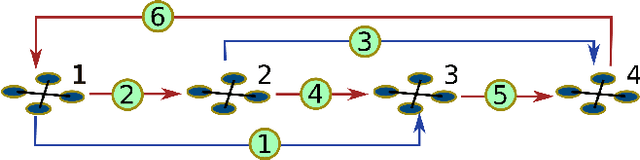
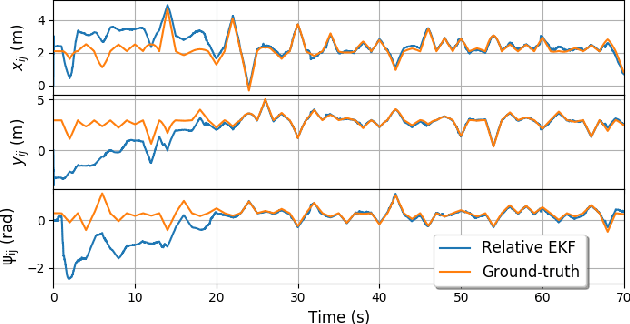
Accurate relative localization is an important requirement for a swarm of robots, especially when performing a cooperative task. This paper presents an autonomous multi-robot system equipped with a fully onboard range-based relative positioning system. It uses onboard sensing of velocity, yaw rate, and height as inputs, and then estimates the relative position of other robots in its own body frame by fusing these quantities with ranging measurements obtained from onboard ultra wide-band (UWB) antennas. Simulations concisely show the high precision, efficiency, and stability of the proposed localization method. Experiments are conducted on a team of 5 Crazyflie 2.0 quadrotors, demonstrating autonomous formation flight and pattern formation, and coordinated flight through a window. All results indicate the effectiveness of the proposed relative positioning method for multi-robot systems.