 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn autonomous swarm of micro flying robots with range-based relative localization
Paper and Code
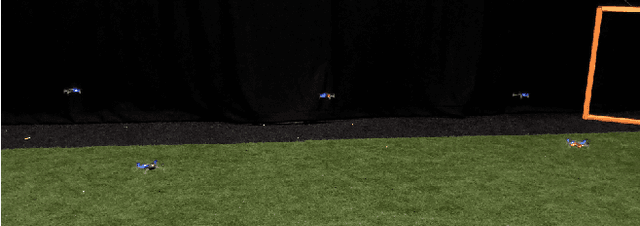
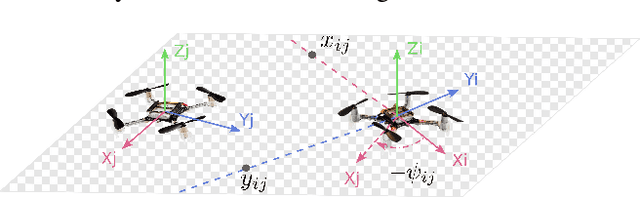
Accurate relative localization is an important requirement for a swarm of robots, especially when performing a cooperative task. This paper presents an autonomous multi-robot system equipped with a fully onboard range-based relative positioning system. It uses onboard sensing of velocity, yaw rate, and height as inputs, and then estimates the relative position of other robots in its own body frame by fusing these quantities with ranging measurements obtained from onboard ultra wide-band (UWB) antennas. Simulations concisely show the high precision, efficiency, and stability of the proposed localization method. Experiments are conducted on a team of 5 Crazyflie 2.0 quadrotors, demonstrating autonomous formation flight and pattern formation, and coordinated flight through a window. All results indicate the effectiveness of the proposed relative positioning method for multi-robot systems.