 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Data Generation for Offline Reinforcement Learning: A Perspective from Model
Jun 24, 2025Offline reinforcement learning (RL) recently gains growing interests from RL researchers. However, the performance of offline RL suffers from the out-of-distribution problem, which can be corrected by feedback in online RL. Previous offline RL research focuses on restricting the offline algorithm in in-distribution even in-sample action sampling. In contrast, fewer work pays attention to the influence of the batch data. In this paper, we first build a bridge over the batch data and the performance of offline RL algorithms theoretically, from the perspective of model-based offline RL optimization. We draw a conclusion that, with mild assumptions, the distance between the state-action pair distribution generated by the behavioural policy and the distribution generated by the optimal policy, accounts for the performance gap between the policy learned by model-based offline RL and the optimal policy. Secondly, we reveal that in task-agnostic settings, a series of policies trained by unsupervised RL can minimize the worst-case regret in the performance gap. Inspired by the theoretical conclusions, UDG (Unsupervised Data Generation) is devised to generate data and select proper data for offline training under tasks-agnostic settings. Empirical results demonstrate that UDG can outperform supervised data generation on solving unknown tasks.
Wasserstein Unsupervised Reinforcement Learning
Oct 15, 2021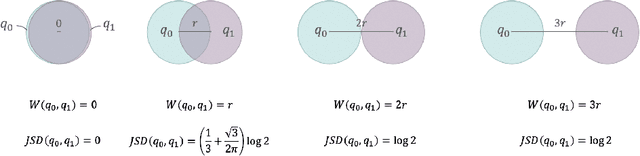
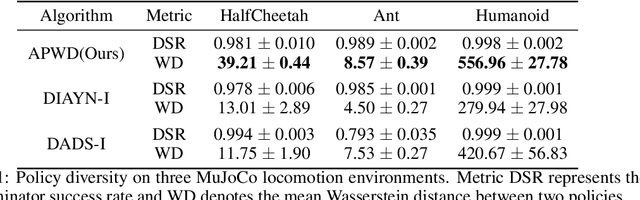
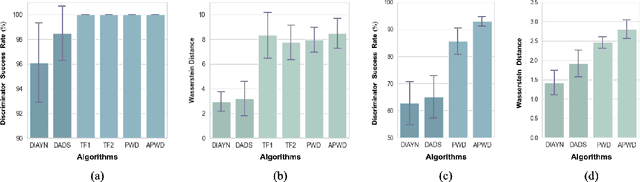
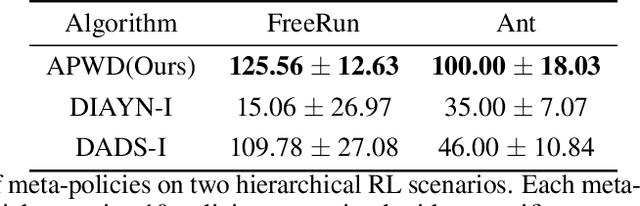
Unsupervised reinforcement learning aims to train agents to learn a handful of policies or skills in environments without external reward. These pre-trained policies can accelerate learning when endowed with external reward, and can also be used as primitive options in hierarchical reinforcement learning. Conventional approaches of unsupervised skill discovery feed a latent variable to the agent and shed its empowerment on agent's behavior by mutual information (MI) maximization. However, the policies learned by MI-based methods cannot sufficiently explore the state space, despite they can be successfully identified from each other. Therefore we propose a new framework Wasserstein unsupervised reinforcement learning (WURL) where we directly maximize the distance of state distributions induced by different policies. Additionally, we overcome difficulties in simultaneously training N(N >2) policies, and amortizing the overall reward to each step. Experiments show policies learned by our approach outperform MI-based methods on the metric of Wasserstein distance while keeping high discriminability. Furthermore, the agents trained by WURL can sufficiently explore the state space in mazes and MuJoCo tasks and the pre-trained policies can be applied to downstream tasks by hierarchical learning.
Reducing Conservativeness Oriented Offline Reinforcement Learning
Feb 27, 2021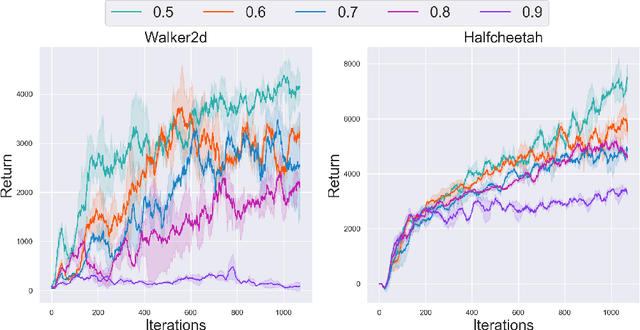
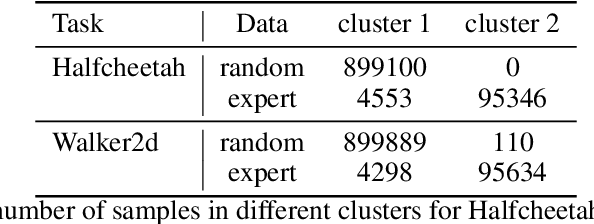
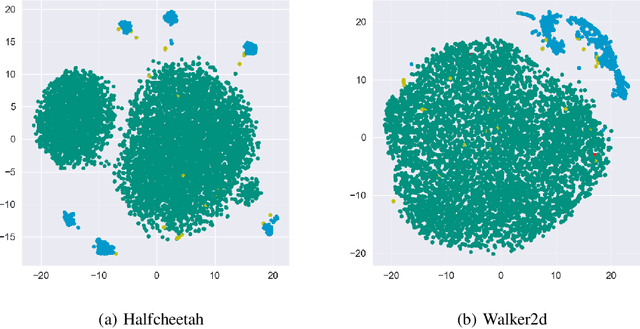
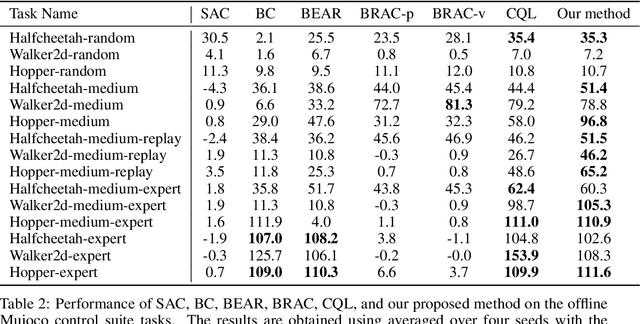
In offline reinforcement learning, a policy learns to maximize cumulative rewards with a fixed collection of data. Towards conservative strategy, current methods choose to regularize the behavior policy or learn a lower bound of the value function. However, exorbitant conservation tends to impair the policy's generalization ability and degrade its performance, especially for the mixed datasets. In this paper, we propose the method of reducing conservativeness oriented reinforcement learning. On the one hand, the policy is trained to pay more attention to the minority samples in the static dataset to address the data imbalance problem. On the other hand, we give a tighter lower bound of value function than previous methods to discover potential optimal actions. Consequently, our proposed method is able to tackle the skewed distribution of the provided dataset and derive a value function closer to the expected value function. Experimental results demonstrate that our proposed method outperforms the state-of-the-art methods in D4RL offline reinforcement learning evaluation tasks and our own designed mixed datasets.
Credit Assignment with Meta-Policy Gradient for Multi-Agent Reinforcement Learning
Feb 24, 2021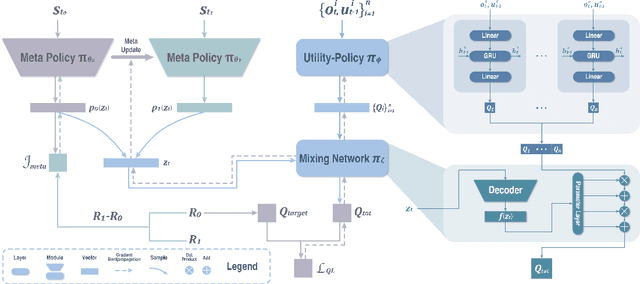
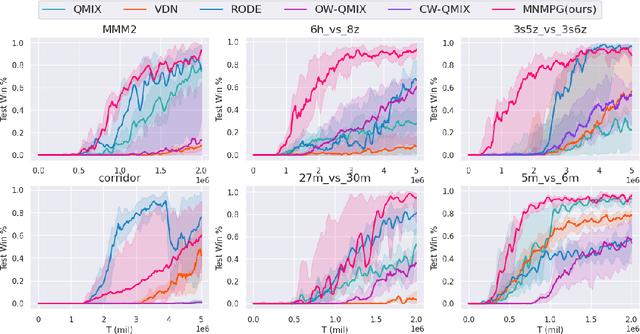
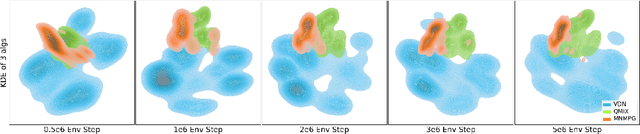
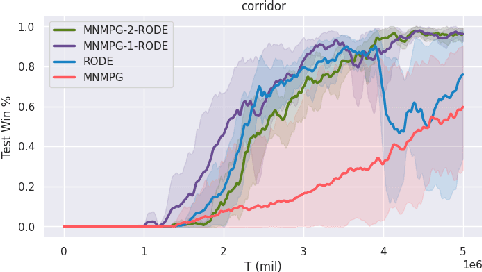
Reward decomposition is a critical problem in centralized training with decentralized execution~(CTDE) paradigm for multi-agent reinforcement learning. To take full advantage of global information, which exploits the states from all agents and the related environment for decomposing Q values into individual credits, we propose a general meta-learning-based Mixing Network with Meta Policy Gradient~(MNMPG) framework to distill the global hierarchy for delicate reward decomposition. The excitation signal for learning global hierarchy is deduced from the episode reward difference between before and after "exercise updates" through the utility network. Our method is generally applicable to the CTDE method using a monotonic mixing network. Experiments on the StarCraft II micromanagement benchmark demonstrate that our method just with a simple utility network is able to outperform the current state-of-the-art MARL algorithms on 4 of 5 super hard scenarios. Better performance can be further achieved when combined with a role-based utility network.
Skill Discovery of Coordination in Multi-agent Reinforcement Learning
Jun 07, 2020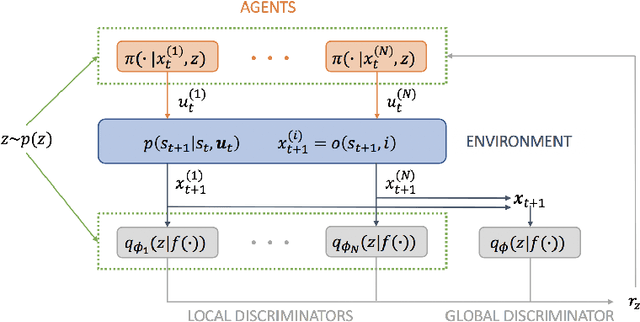
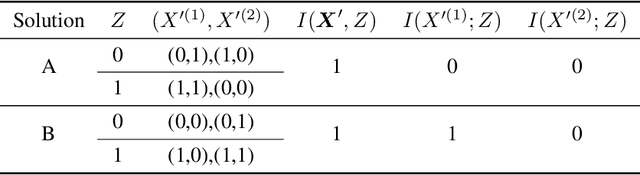
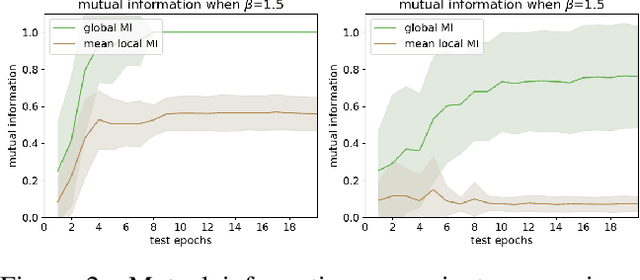

Unsupervised skill discovery drives intelligent agents to explore the unknown environment without task-specific reward signal, and the agents acquire various skills which may be useful when the agents adapt to new tasks. In this paper, we propose "Multi-agent Skill Discovery"(MASD), a method for discovering skills for coordination patterns of multiple agents. The proposed method aims to maximize the mutual information between a latent code Z representing skills and the combination of the states of all agents. Meanwhile it suppresses the empowerment of Z on the state of any single agent by adversarial training. In another word, it sets an information bottleneck to avoid empowerment degeneracy. First we show the emergence of various skills on the level of coordination in a general particle multi-agent environment. Second, we reveal that the "bottleneck" prevents skills from collapsing to a single agent and enhances the diversity of learned skills. Finally, we show the pretrained policies have better performance on supervised RL tasks.