 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkill Discovery of Coordination in Multi-agent Reinforcement Learning
Paper and Code
Jun 07, 2020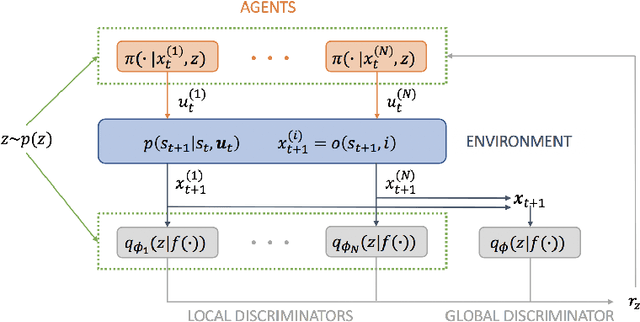
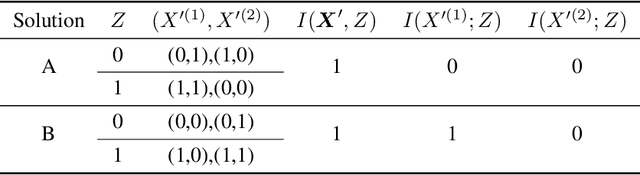
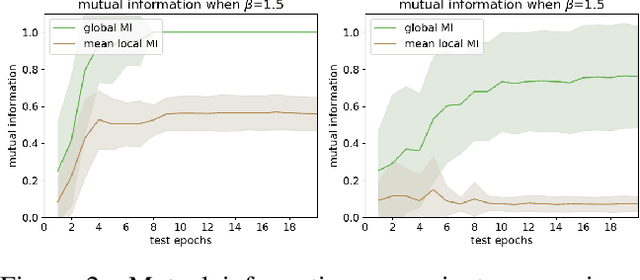

Unsupervised skill discovery drives intelligent agents to explore the unknown environment without task-specific reward signal, and the agents acquire various skills which may be useful when the agents adapt to new tasks. In this paper, we propose "Multi-agent Skill Discovery"(MASD), a method for discovering skills for coordination patterns of multiple agents. The proposed method aims to maximize the mutual information between a latent code Z representing skills and the combination of the states of all agents. Meanwhile it suppresses the empowerment of Z on the state of any single agent by adversarial training. In another word, it sets an information bottleneck to avoid empowerment degeneracy. First we show the emergence of various skills on the level of coordination in a general particle multi-agent environment. Second, we reveal that the "bottleneck" prevents skills from collapsing to a single agent and enhances the diversity of learned skills. Finally, we show the pretrained policies have better performance on supervised RL tasks.