 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalyzing Neural Network Information Flow Using Differential Geometry
Jan 22, 2026This paper provides a fresh view of the neural network (NN) data flow problem, i.e., identifying the NN connections that are most important for the performance of the full model, through the lens of graph theory. Understanding the NN data flow provides a tool for symbolic NN analysis, e.g.,~robustness analysis or model repair. Unlike the standard approach to NN data flow analysis, which is based on information theory, we employ the notion of graph curvature, specifically Ollivier-Ricci curvature (ORC). The ORC has been successfully used to identify important graph edges in various domains such as road traffic analysis, biological and social networks. In particular, edges with negative ORC are considered bottlenecks and as such are critical to the graph's overall connectivity, whereas positive-ORC edges are not essential. We use this intuition for the case of NNs as well: we 1)~construct a graph induced by the NN structure and introduce the notion of neural curvature (NC) based on the ORC; 2)~calculate curvatures based on activation patterns for a set of input examples; 3)~aim to demonstrate that NC can indeed be used to rank edges according to their importance for the overall NN functionality. We evaluate our method through pruning experiments and show that removing negative-ORC edges quickly degrades the overall NN performance, whereas positive-ORC edges have little impact. The proposed method is evaluated on a variety of models trained on three image datasets, namely MNIST, CIFAR-10 and CIFAR-100. The results indicate that our method can identify a larger number of unimportant edges as compared to state-of-the-art pruning methods.
Analyzing Neural Network Robustness Using Graph Curvature
Oct 25, 2024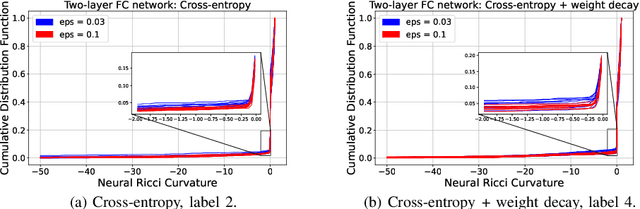
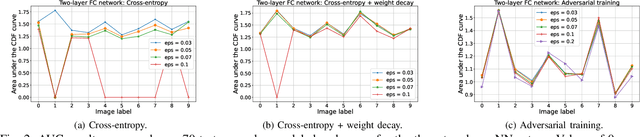

This paper presents a new look at the neural network (NN) robustness problem, from the point of view of graph theory analysis, specifically graph curvature. Graph curvature (e.g., Ricci curvature) has been used to analyze system dynamics and identify bottlenecks in many domains, including road traffic analysis and internet routing. We define the notion of neural Ricci curvature and use it to identify bottleneck NN edges that are heavily used to ``transport data" to the NN outputs. We provide an evaluation on MNIST that illustrates that such edges indeed occur more frequently for inputs where NNs are less robust. These results will serve as the basis for an alternative method of robust training, by minimizing the number of bottleneck edges.
CMSG Cross-Media Semantic-Graph Feature Matching Algorithm for Autonomous Vehicle Relocalization
May 15, 2023


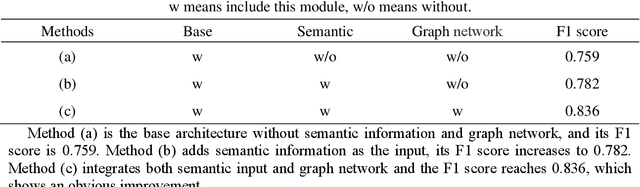
Relocalization is the basis of map-based localization algorithms. Camera and LiDAR map-based methods are pervasive since their robustness under different scenarios. Generally, mapping and localization using the same sensor have better accuracy since matching features between the same type of data is easier. However, due to the camera's lack of 3D information and the high cost of LiDAR, cross-media methods are developing, which combined live image data and Lidar map. Although matching features between different media is challenging, we believe cross-media is the tendency for AV relocalization since its low cost and accuracy can be comparable to the same-sensor-based methods. In this paper, we propose CMSG, a novel cross-media algorithm for AV relocalization tasks. Semantic features are utilized for better interpretation the correlation between point clouds and image features. What's more, abstracted semantic graph nodes are introduced, and a graph network architecture is integrated to better extract the similarity of semantic features. Validation experiments are conducted on the KITTI odometry dataset. Our results show that CMSG can have comparable or even better accuracy compared to current single-sensor-based methods at a speed of 25 FPS on NVIDIA 1080 Ti GPU.
RCP-RF: A Comprehensive Road-car-pedestrian Risk Management Framework based on Driving Risk Potential Field
May 04, 2023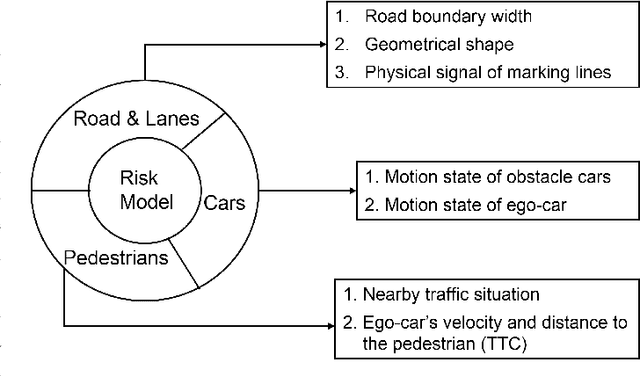
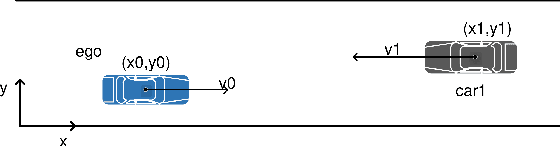
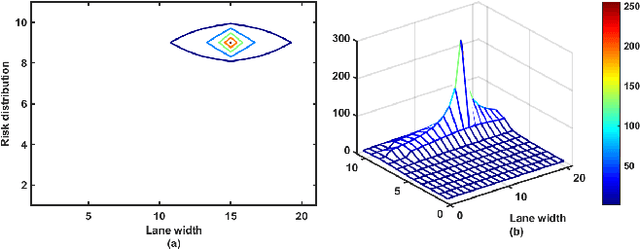
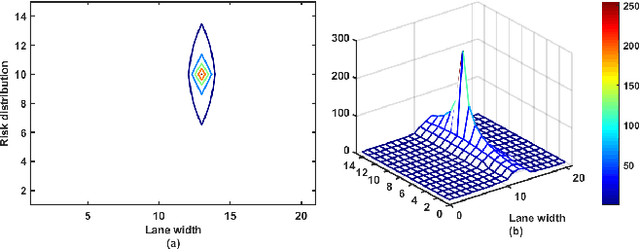
Recent years have witnessed the proliferation of traffic accidents, which led wide researches on Automated Vehicle (AV) technologies to reduce vehicle accidents, especially on risk assessment framework of AV technologies. However, existing time-based frameworks can not handle complex traffic scenarios and ignore the motion tendency influence of each moving objects on the risk distribution, leading to performance degradation. To address this problem, we novelly propose a comprehensive driving risk management framework named RCP-RF based on potential field theory under Connected and Automated Vehicles (CAV) environment, where the pedestrian risk metric are combined into a unified road-vehicle driving risk management framework. Different from existing algorithms, the motion tendency between ego and obstacle cars and the pedestrian factor are legitimately considered in the proposed framework, which can improve the performance of the driving risk model. Moreover, it requires only O(N 2) of time complexity in the proposed method. Empirical studies validate the superiority of our proposed framework against state-of-the-art methods on real-world dataset NGSIM and real AV platform.
A New Adaptive Noise Covariance Matrices Estimation and Filtering Method: Application to Multi-Object Tracking
Dec 20, 2021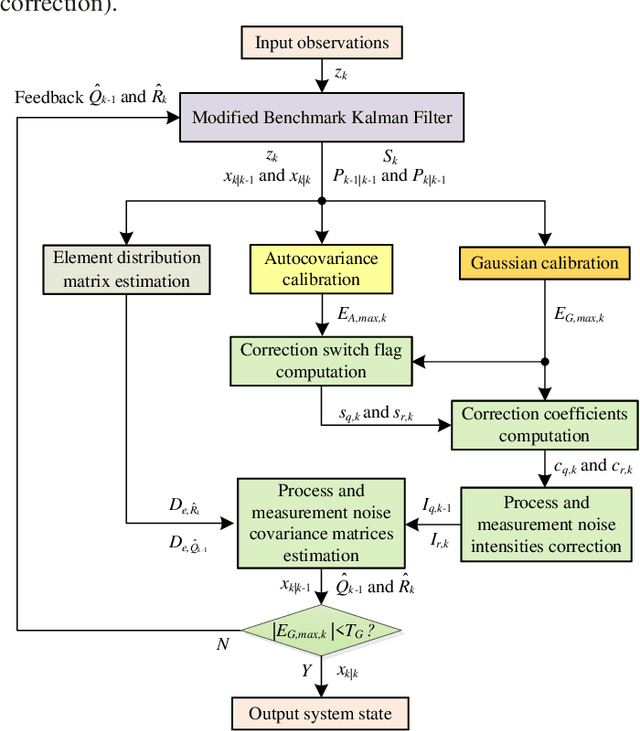
Kalman filters are widely used for object tracking, where process and measurement noise are usually considered accurately known and constant. However, the exact known and constant assumptions do not always hold in practice. For example, when lidar is used to track noncooperative targets, the measurement noise is different under different distances and weather conditions. In addition, the process noise changes with the object's motion state, especially when the tracking object is a pedestrian, and the process noise changes more frequently. This paper proposes a new estimation-calibration-correction closed-loop estimation method to estimate the Kalman filter process and measurement noise covariance matrices online. First, we decompose the noise covariance matrix into an element distribution matrix and noise intensity and improve the Sage filter to estimate the element distribution matrix. Second, we propose a calibration method to accurately diagnose the noise intensity deviation. We then propose a correct method to adaptively correct the noise intensity online. Third, under the assumption that the system is detectable, the unbiased and convergence of the proposed method is mathematically proven. Simulation results prove the effectiveness and reliability of the proposed method. Finally, we apply the proposed method to multiobject tracking of lidar and evaluate it on the official KITTI server. The proposed method on the KITTI pedestrian multiobject tracking leaderboard (http://www.cvlibs.net/datasets /kitti/eval_tracking.php) surpasses all existing methods using lidar, proving the feasibility of the method in practical applications. This work provides a new way to improve the performance of the Kalman filter and multiobject tracking.