 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSatisfiability Solving with LLMs: A Matched-Pair Evaluation of Reasoning Capability
May 27, 2026Large language models (LLMs) are increasingly used for tasks that implicitly reduce to Boolean satisfiability (SAT), yet their reasoning ability on SAT remains unclear. We present a systematic study of LLMs on 2-SAT and 3-SAT, together with two canonical reductions, Vertex Cover and discrete 3D packing, to probe representation-invariant reasoning. We first evaluate models using conventional metrics, including accuracy, precision, recall, and F1, as well as the SAT phase-transition setting. We find that these metrics can be misleading: many models obtain high scores by over-predicting satisfiable formulas, fail to reproduce the classical easy-hard-easy signature around the 3-SAT threshold, and degrade sharply as the number of variables grows. To address this problem, we introduce a paired-formula protocol based on minimally different satisfiable and unsatisfiable instances, together with Accurate Differentiation Rate (ADR), which requires both members of each pair to be classified correctly. ADR separates reasoning-oriented models from heuristic ones and correlates with witness validity. Beyond CNF, we test cross-representation consistency by converting CNF to Vertex Cover and 3-SAT to discrete 3D packing. Model decisions on CNF and on the corresponding graph or packing instances agree for most models on more than 80 percent of instances, suggesting stable decision rules across representations. Overall, our results show that SAT is a conservative probe for LLM reasoning, and that paired evaluation with ADR provides a more faithful and representation-robust assessment than conventional metrics.
Suppressing Acoustomigration and Temperature Rise for High-power Robust Acoustics
Mar 11, 2026High-frequency acoustic wave transducers, vibrating at gigahertz (GHz), favored for their compact size, are not only dominating the front-end of mobile handsets but are also expanding into various interdisciplinary fields, including quantum acoustics, acoustic-optics, acoustic-fluids, acoustoelectric, and sustainable power conversion systems. However, like strong vibration can "shake off" substances and produce heat, a long-standing bottleneck has been the ability to harness acoustics under high-power vibration loads, while simultaneously suppressing temperature rise, especially for IDT-based surface acoustic wave (SAW) systems. Here, we proposed a layered acoustic wave (LAW) platform, utilizing a quasi-infinite multifunctional top layer, that redefines mechanical and thermal boundary conditions to overcome three fundamental challenges in high-power acoustic wave vibration: self-heating, thermal instability, and acoustomigration. By simply leveraging a simplified, thick single-material overlayer to achieve electro-thermo-mechanical co-design, this acoustic platform moves beyond prior substrate-focused thermal management in SAW technology. It demonstrates, for the first time from the top boundary, simultaneous redistribution of the von Mises stress field and the creation of an efficient vertical thermal dissipation path. The LAW transducer, vibrating at over 2 GHz, achieves a 70% reduction in temperature rise under identical power loads, a first-order temperature coefficient of frequency (TCF) of -13 ppm/C with minimal dispersion, and an unprecedented threshold power density of 45.61 dBm/mm2 - over one order-of-magnitude higher than that of state-of-the-art thin-film surface acoustic wave (TF-SAW) counterparts at the same wavelength.
Utilizing the Score of Data Distribution for Hyperspectral Anomaly Detection
Jan 18, 2026Hyperspectral images (HSIs) are a type of image that contains abundant spectral information. As a type of real-world data, the high-dimensional spectra in hyperspectral images are actually determined by only a few factors, such as chemical composition and illumination. Thus, spectra in hyperspectral images are highly likely to satisfy the manifold hypothesis. Based on the hyperspectral manifold hypothesis, we propose a novel hyperspectral anomaly detection method (named ScoreAD) that leverages the time-dependent gradient field of the data distribution (i.e., the score), as learned by a score-based generative model (SGM). Our method first trains the SGM on the entire set of spectra from the hyperspectral image. At test time, each spectrum is passed through a perturbation kernel, and the resulting perturbed spectrum is fed into the trained SGM to obtain the estimated score. The manifold hypothesis of HSIs posits that background spectra reside on one or more low-dimensional manifolds. Conversely, anomalous spectra, owing to their unique spectral signatures, are considered outliers that do not conform to the background manifold. Based on this fundamental discrepancy in their manifold distributions, we leverage a generative SGM to achieve hyperspectral anomaly detection. Experiments on the four hyperspectral datasets demonstrate the effectiveness of the proposed method. The code is available at https://github.com/jiahuisheng/ScoreAD.
Turbo-GoDec: Exploiting the Cluster Sparsity Prior for Hyperspectral Anomaly Detection
Jan 18, 2026As a key task in hyperspectral image processing, hyperspectral anomaly detection has garnered significant attention and undergone extensive research. Existing methods primarily relt on two prior assumption: low-rank background and sparse anomaly, along with additional spatial assumptions of the background. However, most methods only utilize the sparsity prior assumption for anomalies and rarely expand on this hypothesis. From observations of hyperspectral images, we find that anomalous pixels exhibit certain spatial distribution characteristics: they often manifest as small, clustered groups in space, which we refer to as cluster sparsity of anomalies. Then, we combined the cluster sparsity prior with the classical GoDec algorithm, incorporating the cluster sparsity prior into the S-step of GoDec. This resulted in a new hyperspectral anomaly detection method, which we called Turbo-GoDec. In this approach, we modeled the cluster sparsity prior of anomalies using a Markov random field and computed the marginal probabilities of anomalies through message passing on a factor graph. Locations with high anomalous probabilities were treated as the sparse component in the Turbo-GoDec. Experiments are conducted on three real hyperspectral image (HSI) datasets which demonstrate the superior performance of the proposed Turbo-GoDec method in detecting small-size anomalies comparing with the vanilla GoDec (LSMAD) and state-of-the-art anomaly detection methods. The code is available at https://github.com/jiahuisheng/Turbo-GoDec.
Exploring the Intrinsic Probability Distribution for Hyperspectral Anomaly Detection
May 14, 2021

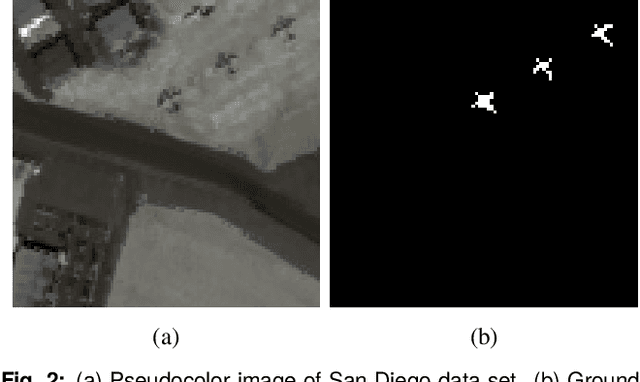
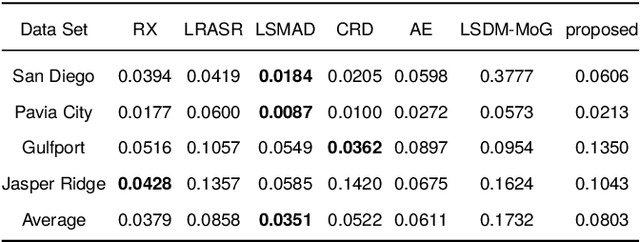
In recent years, neural network-based anomaly detection methods have attracted considerable attention in the hyperspectral remote sensing domain due to the powerful reconstruction ability compared with traditional methods. However, actual probability distribution statistics hidden in the latent space are not discovered by exploiting the reconstruction error because the probability distribution of anomalies is not explicitly modeled. To address the issue, we propose a novel probability distribution representation detector (PDRD) that explores the intrinsic distribution of both the background and the anomalies in original data for hyperspectral anomaly detection in this paper. First, we represent the hyperspectral data with multivariate Gaussian distributions from a probabilistic perspective. Then, we combine the local statistics with the obtained distributions to leverage the spatial information. Finally, the difference between the corresponding distributions of the test pixel and the average expectation of the pixels in the Chebyshev neighborhood is measured by computing the modified Wasserstein distance to acquire the detection map. We conduct the experiments on four real data sets to evaluate the performance of our proposed method. Experimental results demonstrate the accuracy and efficiency of our proposed method compared to the state-of-the-art detection methods.
Multiple Infrared Small Targets Detection based on Hierarchical Maximal Entropy Random Walk
Oct 02, 2020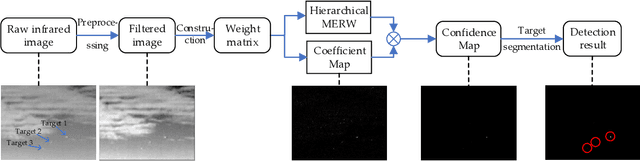
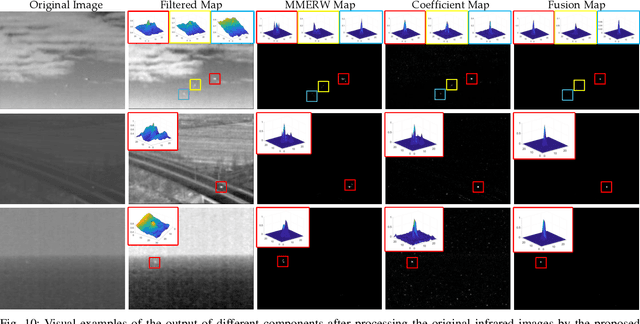
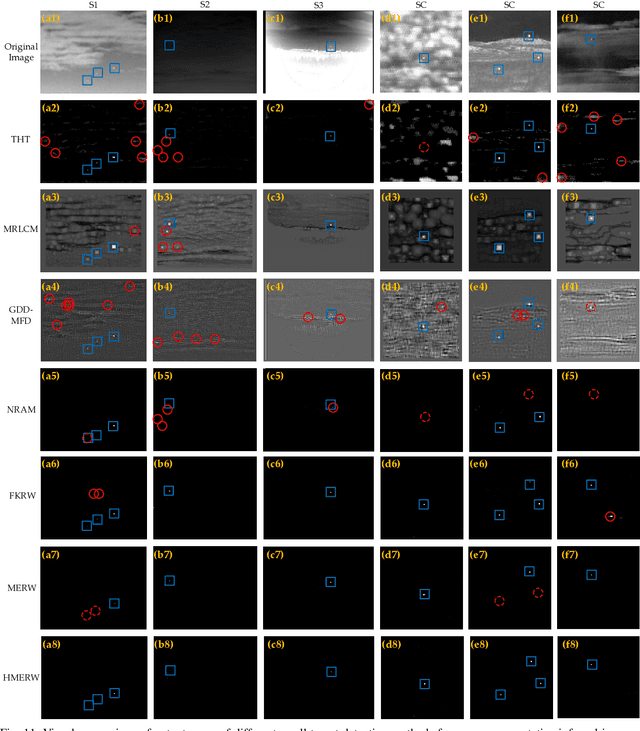
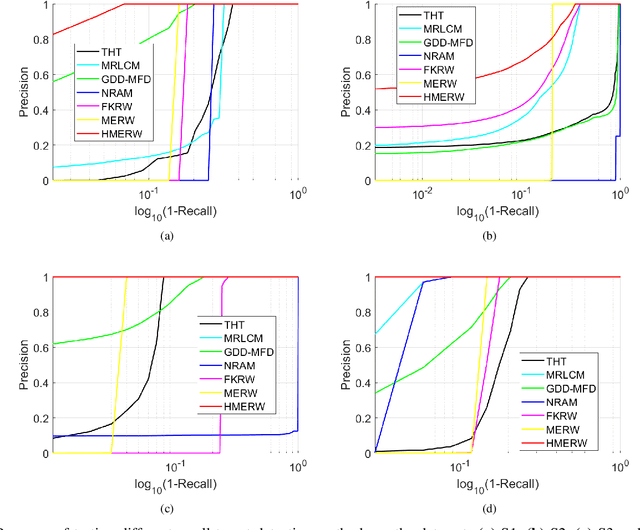
The technique of detecting multiple dim and small targets with low signal-to-clutter ratios (SCR) is very important for infrared search and tracking systems. In this paper, we establish a detection method derived from maximal entropy random walk (MERW) to robustly detect multiple small targets. Initially, we introduce the primal MERW and analyze the feasibility of applying it to small target detection. However, the original weight matrix of the MERW is sensitive to interferences. Therefore, a specific weight matrix is designed for the MERW in principle of enhancing characteristics of small targets and suppressing strong clutters. Moreover, the primal MERW has a critical limitation of strong bias to the most salient small target. To achieve multiple small targets detection, we develop a hierarchical version of the MERW method. Based on the hierarchical MERW (HMERW), we propose a small target detection method as follows. First, filtering technique is used to smooth the infrared image. Second, an output map is obtained by importing the filtered image into the HMERW. Then, a coefficient map is constructed to fuse the stationary dirtribution map of the HMERW. Finally, an adaptive threshold is used to segment multiple small targets from the fusion map. Extensive experiments on practical data sets demonstrate that the proposed method is superior to the state-of-the-art methods in terms of target enhancement, background suppression and multiple small targets detection.
Progressively Guided Alternate Refinement Network for RGB-D Salient Object Detection
Aug 17, 2020
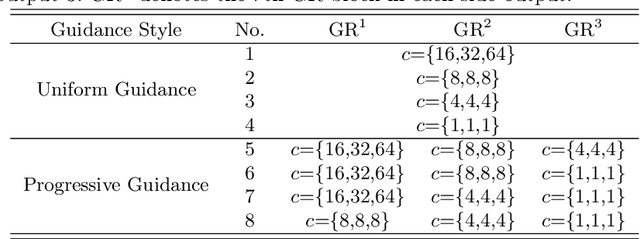
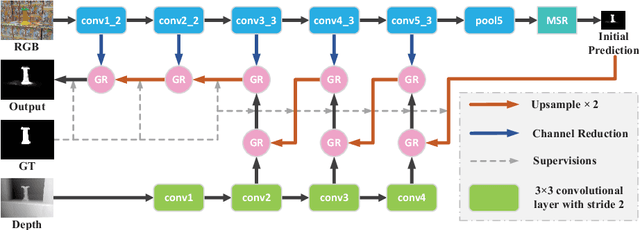
In this paper, we aim to develop an efficient and compact deep network for RGB-D salient object detection, where the depth image provides complementary information to boost performance in complex scenarios. Starting from a coarse initial prediction by a multi-scale residual block, we propose a progressively guided alternate refinement network to refine it. Instead of using ImageNet pre-trained backbone network, we first construct a lightweight depth stream by learning from scratch, which can extract complementary features more efficiently with less redundancy. Then, different from the existing fusion based methods, RGB and depth features are fed into proposed guided residual (GR) blocks alternately to reduce their mutual degradation. By assigning progressive guidance in the stacked GR blocks within each side-output, the false detection and missing parts can be well remedied. Extensive experiments on seven benchmark datasets demonstrate that our model outperforms existing state-of-the-art approaches by a large margin, and also shows superiority in efficiency (71 FPS) and model size (64.9 MB).
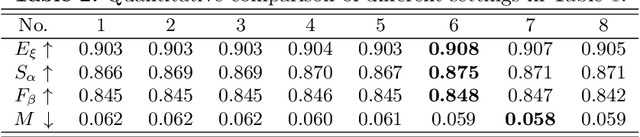
Reverse Attention for Salient Object Detection
Jul 26, 2018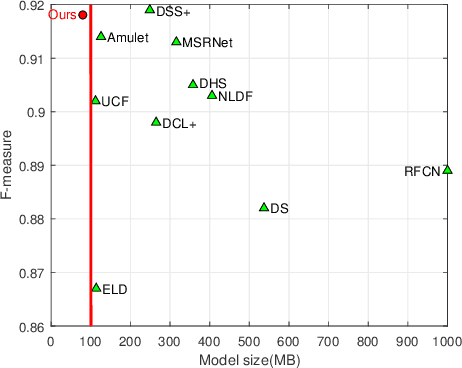

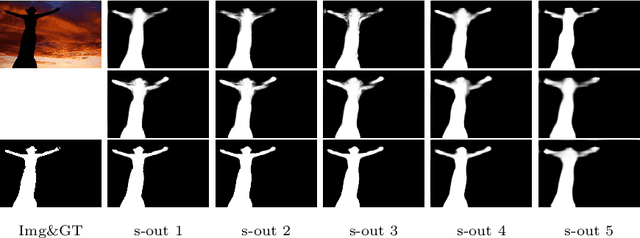
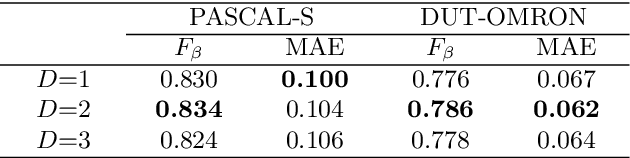
Benefit from the quick development of deep learning techniques, salient object detection has achieved remarkable progresses recently. However, there still exists following two major challenges that hinder its application in embedded devices, low resolution output and heavy model weight. To this end, this paper presents an accurate yet compact deep network for efficient salient object detection. More specifically, given a coarse saliency prediction in the deepest layer, we first employ residual learning to learn side-output residual features for saliency refinement, which can be achieved with very limited convolutional parameters while keep accuracy. Secondly, we further propose reverse attention to guide such side-output residual learning in a top-down manner. By erasing the current predicted salient regions from side-output features, the network can eventually explore the missing object parts and details which results in high resolution and accuracy. Experiments on six benchmark datasets demonstrate that the proposed approach compares favorably against state-of-the-art methods, and with advantages in terms of simplicity, efficiency (45 FPS) and model size (81 MB).
Saliency Detection for Improving Object Proposals
Oct 17, 2016Object proposals greatly benefit object detection task in recent state-of-the-art works. However, the existing object proposals usually have low localization accuracy at high intersection over union threshold. To address it, we apply saliency detection to each bounding box to improve their quality in this paper. We first present a geodesic saliency detection method in contour, which is designed to find closed contours. Then, we apply it to each candidate box with multi-sizes, and refined boxes can be easily produced in the obtained saliency maps which are further used to calculate saliency scores for proposal ranking. Experiments on PASCAL VOC 2007 test dataset demonstrate the proposed refinement approach can greatly improve existing models.