 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion Knows Transparency: Repurposing Video Diffusion for Transparent Object Depth and Normal Estimation
Dec 29, 2025Transparent objects remain notoriously hard for perception systems: refraction, reflection and transmission break the assumptions behind stereo, ToF and purely discriminative monocular depth, causing holes and temporally unstable estimates. Our key observation is that modern video diffusion models already synthesize convincing transparent phenomena, suggesting they have internalized the optical rules. We build TransPhy3D, a synthetic video corpus of transparent/reflective scenes: 11k sequences rendered with Blender/Cycles. Scenes are assembled from a curated bank of category-rich static assets and shape-rich procedural assets paired with glass/plastic/metal materials. We render RGB + depth + normals with physically based ray tracing and OptiX denoising. Starting from a large video diffusion model, we learn a video-to-video translator for depth (and normals) via lightweight LoRA adapters. During training we concatenate RGB and (noisy) depth latents in the DiT backbone and co-train on TransPhy3D and existing frame-wise synthetic datasets, yielding temporally consistent predictions for arbitrary-length input videos. The resulting model, DKT, achieves zero-shot SOTA on real and synthetic video benchmarks involving transparency: ClearPose, DREDS (CatKnown/CatNovel), and TransPhy3D-Test. It improves accuracy and temporal consistency over strong image/video baselines, and a normal variant sets the best video normal estimation results on ClearPose. A compact 1.3B version runs at ~0.17 s/frame. Integrated into a grasping stack, DKT's depth boosts success rates across translucent, reflective and diffuse surfaces, outperforming prior estimators. Together, these results support a broader claim: "Diffusion knows transparency." Generative video priors can be repurposed, efficiently and label-free, into robust, temporally coherent perception for challenging real-world manipulation.
DF-Calib: Targetless LiDAR-Camera Calibration via Depth Flow
Apr 02, 2025


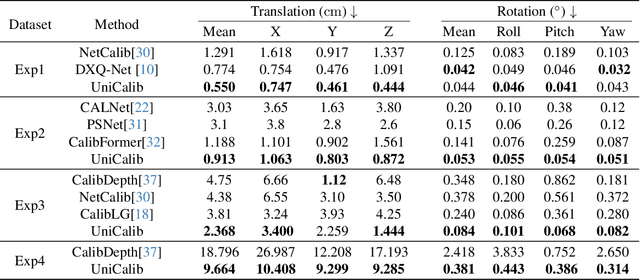
Precise LiDAR-camera calibration is crucial for integrating these two sensors into robotic systems to achieve robust perception. In applications like autonomous driving, online targetless calibration enables a prompt sensor misalignment correction from mechanical vibrations without extra targets. However, existing methods exhibit limitations in effectively extracting consistent features from LiDAR and camera data and fail to prioritize salient regions, compromising cross-modal alignment robustness. To address these issues, we propose DF-Calib, a LiDAR-camera calibration method that reformulates calibration as an intra-modality depth flow estimation problem. DF-Calib estimates a dense depth map from the camera image and completes the sparse LiDAR projected depth map, using a shared feature encoder to extract consistent depth-to-depth features, effectively bridging the 2D-3D cross-modal gap. Additionally, we introduce a reliability map to prioritize valid pixels and propose a perceptually weighted sparse flow loss to enhance depth flow estimation. Experimental results across multiple datasets validate its accuracy and generalization,with DF-Calib achieving a mean translation error of 0.635cm and rotation error of 0.045 degrees on the KITTI dataset.
QuadricsReg: Large-Scale Point Cloud Registration using Quadric Primitives
Dec 04, 2024



In the realm of large-scale point cloud registration, designing a compact symbolic representation is crucial for efficiently processing vast amounts of data, ensuring registration robustness against significant viewpoint variations and occlusions. This paper introduces a novel point cloud registration method, i.e., QuadricsReg, which leverages concise quadrics primitives to represent scenes and utilizes their geometric characteristics to establish correspondences for 6-DoF transformation estimation. As a symbolic feature, the quadric representation fully captures the primary geometric characteristics of scenes, which can efficiently handle the complexity of large-scale point clouds. The intrinsic characteristics of quadrics, such as types and scales, are employed to initialize correspondences. Then we build a multi-level compatibility graph set to find the correspondences using the maximum clique on the geometric consistency between quadrics. Finally, we estimate the 6-DoF transformation using the quadric correspondences, which is further optimized based on the quadric degeneracy-aware distance in a factor graph, ensuring high registration accuracy and robustness against degenerate structures. We test on 5 public datasets and the self-collected heterogeneous dataset across different LiDAR sensors and robot platforms. The exceptional registration success rates and minimal registration errors demonstrate the effectiveness of QuadricsReg in large-scale point cloud registration scenarios. Furthermore, the real-world registration testing on our self-collected heterogeneous dataset shows the robustness and generalization ability of QuadricsReg on different LiDAR sensors and robot platforms. The codes and demos will be released at \url{https://levenberg.github.io/QuadricsReg}.
A Simple Framework to Enhance the Adversarial Robustness of Deep Learning-based Intrusion Detection System
Dec 06, 2023Deep learning based intrusion detection systems (DL-based IDS) have emerged as one of the best choices for providing security solutions against various network intrusion attacks. However, due to the emergence and development of adversarial deep learning technologies, it becomes challenging for the adoption of DL models into IDS. In this paper, we propose a novel IDS architecture that can enhance the robustness of IDS against adversarial attacks by combining conventional machine learning (ML) models and Deep Learning models. The proposed DLL-IDS consists of three components: DL-based IDS, adversarial example (AE) detector, and ML-based IDS. We first develop a novel AE detector based on the local intrinsic dimensionality (LID). Then, we exploit the low attack transferability between DL models and ML models to find a robust ML model that can assist us in determining the maliciousness of AEs. If the input traffic is detected as an AE, the ML-based IDS will predict the maliciousness of input traffic, otherwise the DL-based IDS will work for the prediction. The fusion mechanism can leverage the high prediction accuracy of DL models and low attack transferability between DL models and ML models to improve the robustness of the whole system. In our experiments, we observe a significant improvement in the prediction performance of the IDS when subjected to adversarial attack, achieving high accuracy with low resource consumption.