 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAVNet: an Effective Semantic Segmentation Micro-Network for MAV-based Tasks
Apr 03, 2019
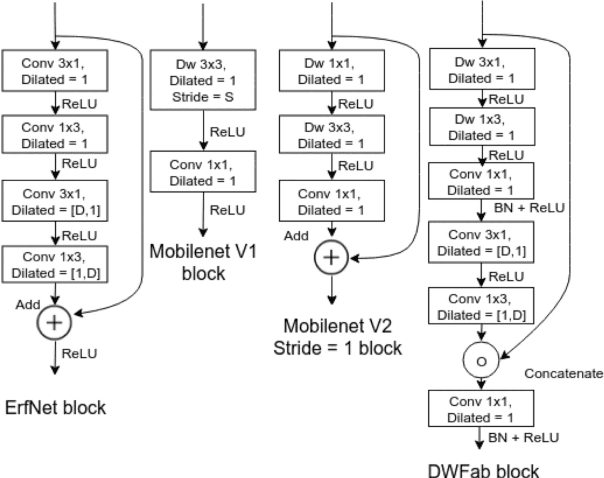

Real-time image semantic segmentation is an essential capability to enhance robot autonomy and improve human situational awareness. In this paper, we present MAVNet, a novel deep neural network approach for semantic segmentation suitable for small scale Micro Aerial Vehicles (MAVs). Our approach is compatible with the size, weight, and power(SWaP) constraints typical of small scale MAVs, which can only employ small processing units and GPUs. These units have typically limited computational capacity, which has to be concurrently shared with other real time performance tasks such as visual odometry and path planning. Our proposed solution MAVNet, is a fast and compact network inspired by ERFNet and features about 400 times fewer parameters in comparison. Experimental results on multiple datasets validate our proposed approach. Additionally, comparisons with other state of the art approaches show that our solution outperforms theirs in terms of speed and accuracy achieving up to 48 FPS on an NVIDIA 1080Ti and 9 FPS on the NVIDIA Jetson Xavier when processing high resolution imagery. Our algorithm and datasets are made publicly available.