 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Terramechanics Approach Towards a Realistic Real-Time Simulator for Lunar Rovers
Jan 08, 2026High-fidelity simulators for the lunar surface provide a digital environment for extensive testing of rover operations and mission planning. However, current simulators focus on either visual realism or physical accuracy, which limits their capability to replicate lunar conditions comprehensively. This work addresses that gap by combining high visual fidelity with realistic terrain interaction for a realistic representation of rovers on the lunar surface. Because direct simulation of wheel-soil interactions is computationally expensive, a data-driven approach was adopted, using regression models for slip and sinkage from data collected in both full-rover and single-wheel experiments and simulations. The resulting regression-based terramechanics model accurately reproduced steady-state and dynamic slip, as well as sinkage behavior, on flat terrain and slopes up to 20 degrees, with validation against field test results. Additionally, improvements were made to enhance the realism of terrain deformation and wheel trace visualization. This method supports real-time applications that require physically plausible terrain response alongside high visual fidelity.
Design and Development of Modular Limbs for Reconfigurable Robots on the Moon
Jan 08, 2026In this paper, we present the development of 4-DOF robot limbs, which we call Moonbots, designed to connect in various configurations with each other and wheel modules, enabling adaptation to different environments and tasks. These modular components are intended primarily for robotic systems in space exploration and construction on the Moon in our Moonshot project. Such modular robots add flexibility and versatility for space missions where resources are constrained. Each module is driven by a common actuator characterized by a high torque-to-speed ratio, supporting both precise control and dynamic motion when required. This unified actuator design simplifies development and maintenance across the different module types. The paper describes the hardware implementation, the mechanical design of the modules, and the overall software architecture used to control and coordinate them. Additionally, we evaluate the control performance of the actuator under various load conditions to characterize its suitability for modular robot applications. To demonstrate the adaptability of the system, we introduce nine functional configurations assembled from the same set of modules: 4DOF-limb, 8DOF-limb, vehicle, dragon, minimal, quadruped, cargo, cargo-minimal, and bike. These configurations reflect different locomotion strategies and task-specific behaviors, offering a practical foundation for further research in reconfigurable robotic systems.
Discrete Fourier Transform-based Point Cloud Compression for Efficient SLAM in Featureless Terrain
Jan 08, 2026Simultaneous Localization and Mapping (SLAM) is an essential technology for the efficiency and reliability of unmanned robotic exploration missions. While the onboard computational capability and communication bandwidth are critically limited, the point cloud data handled by SLAM is large in size, attracting attention to data compression methods. To address such a problem, in this paper, we propose a new method for compressing point cloud maps by exploiting the Discrete Fourier Transform (DFT). The proposed technique converts the Digital Elevation Model (DEM) to the frequency-domain 2D image and omits its high-frequency components, focusing on the exploration of gradual terrains such as planets and deserts. Unlike terrains with detailed structures such as artificial environments, high-frequency components contribute little to the representation of gradual terrains. Thus, this method is effective in compressing data size without significant degradation of the point cloud. We evaluated the method in terms of compression rate and accuracy using camera sequences of two terrains with different elevation profiles.
A Sequential Hermaphrodite Coupling Mechanism for Lattice-based Modular Robots
Dec 29, 2025Lattice-based modular robot systems are envisioned for large-scale construction in extreme environments, such as space. Coupling mechanisms for heterogeneous structural modules should meet all of the following requirements: single-sided coupling and decoupling, flat surfaces when uncoupled, and coupling to passive coupling interfaces as well as coupling behavior between coupling mechanisms. The design requirements for such a coupling mechanism are complex. We propose a novel shape-matching mechanical coupling mechanism that satisfies these design requirements. This mechanism enables controlled, sequential transitions between male and female states. When uncoupled, all mechanisms are in the female state. To enable single-sided coupling, one side of the mechanisms switches to the male state during the coupling process. Single-sided decoupling is possible not only from the male side but also from the female side by forcibly switching the opposite mechanism's male state to the female state. This coupling mechanism can be applied to various modular robot systems and robot arm tool changers.
MoonBot: Modular and On-Demand Reconfigurable Robot Toward Moon Base Construction
Dec 26, 2025The allure of lunar surface exploration and development has recently captured widespread global attention. Robots have proved to be indispensable for exploring uncharted terrains, uncovering and leveraging local resources, and facilitating the construction of future human habitats. In this article, we introduce the modular and on-demand reconfigurable robot (MoonBot), a modular and reconfigurable robotic system engineered to maximize functionality while operating within the stringent mass constraints of lunar payloads and adapting to varying environmental conditions and task requirements. This article details the design and development of MoonBot and presents a preliminary field demonstration that validates the proof of concept through the execution of milestone tasks simulating the establishment of lunar infrastructure. These tasks include essential civil engineering operations, infrastructural component transportation and deployment, and assistive operations with inflatable modules. Furthermore, we systematically summarize the lessons learned during testing, focusing on the connector design and providing valuable insights for the advancement of modular robotic systems in future lunar missions.
Multi-Modal Decentralized Reinforcement Learning for Modular Reconfigurable Lunar Robots
Oct 23, 2025Modular reconfigurable robots suit task-specific space operations, but the combinatorial growth of morphologies hinders unified control. We propose a decentralized reinforcement learning (Dec-RL) scheme where each module learns its own policy: wheel modules use Soft Actor-Critic (SAC) for locomotion and 7-DoF limbs use Proximal Policy Optimization (PPO) for steering and manipulation, enabling zero-shot generalization to unseen configurations. In simulation, the steering policy achieved a mean absolute error of 3.63{\deg} between desired and induced angles; the manipulation policy plateaued at 84.6 % success on a target-offset criterion; and the wheel policy cut average motor torque by 95.4 % relative to baseline while maintaining 99.6 % success. Lunar-analogue field tests validated zero-shot integration for autonomous locomotion, steering, and preliminary alignment for reconfiguration. The system transitioned smoothly among synchronous, parallel, and sequential modes for Policy Execution, without idle states or control conflicts, indicating a scalable, reusable, and robust approach for modular lunar robots.
Modeling of Terrain Deformation by a Grouser Wheel for Lunar Rover Simulation
Aug 24, 2024Simulation of vehicle motion in planetary environments is challenging. This is due to the modeling of complex terrain, optical conditions, and terrain-aware vehicle dynamics. One of the critical issues of typical simulators is that they assume terrain is a rigid body, which limits their ability to render wheel traces and compute the wheel-terrain interactions. This prevents, for example, the use of wheel traces as landmarks for localization, as well as the accurate simulation of motion. In the context of lunar regolith, the surface is not rigid but granular. As such, there are differences in the rover's motion, such as sinkage and slippage, and a clear wheel trace left behind the rover, compared to that on a rigid terrain. This study presents a novel approach to integrating a terramechanics-aware terrain deformation engine to simulate a realistic wheel trace in a digital lunar environment. By leveraging Discrete Element Method simulation results alongside experimental single-wheel test data, we construct a regression model to derive deformation height as a function of contact normal force. The region of interest in a height map is retrieved from the wheel poses. The elevation values of corresponding pixels are subsequently modified using contact normal forces and the regression model. Finally, we apply the determined elevation change to each mesh vertex to render wheel traces during runtime. The deformation engine is integrated into our ongoing development of a lunar simulator based on NVIDIA's Omniverse IsaacSim. We hypothesize that our work will be crucial to testing perception and downstream navigation systems under conditions similar to outdoor or terrestrial fields. A demonstration video is available here: https://www.youtube.com/watch?v=TpzD0h-5hv4
Risk-Aware Coverage Path Planning for Lunar Micro-Rovers Leveraging Global and Local Environmental Data
Apr 29, 2024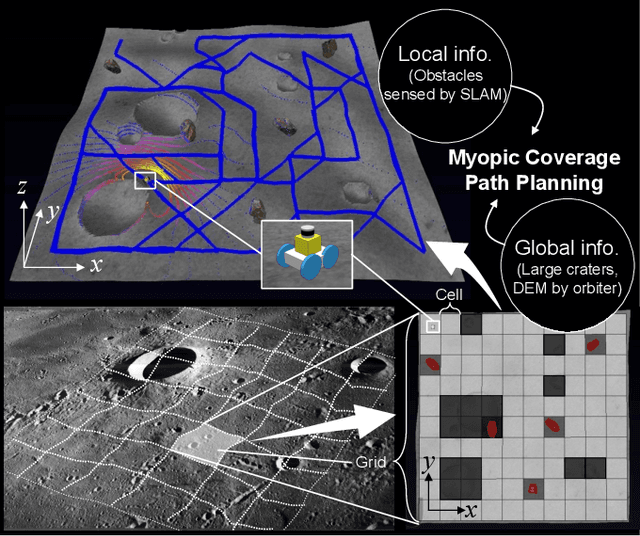
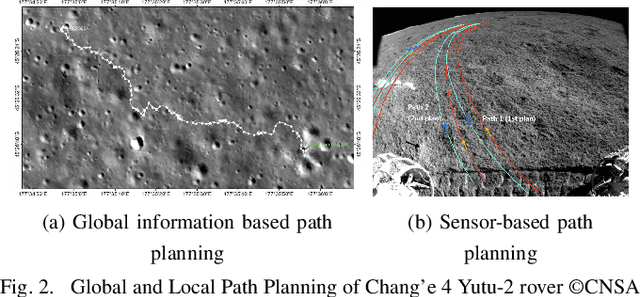
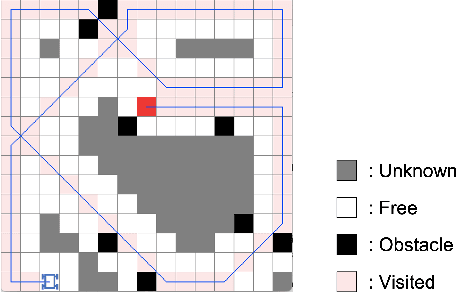
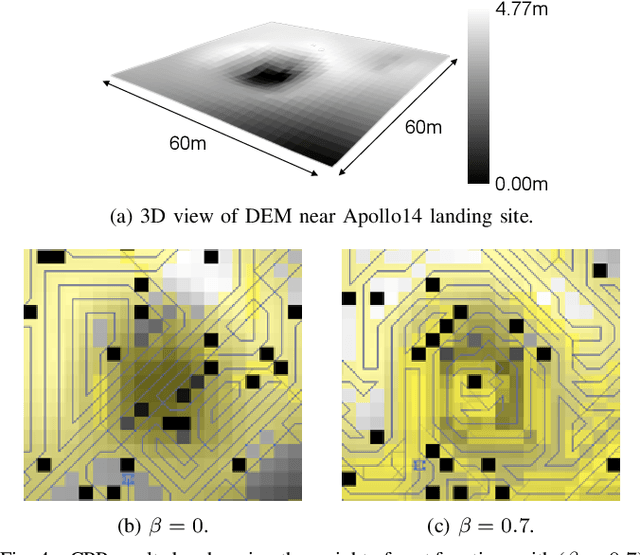
This paper presents a novel 3D myopic coverage path planning algorithm for lunar micro-rovers that can explore unknown environments with limited sensing and computational capabilities. The algorithm expands upon traditional non-graph path planning methods to accommodate the complexities of lunar terrain, utilizing global data with local topographic features into motion cost calculations. The algorithm also integrates localization and mapping to update the rover's pose and map the environment. The resulting environment map's accuracy is evaluated and tested in a 3D simulator. Outdoor field tests were conducted to validate the algorithm's efficacy in sim-to-real scenarios. The results showed that the algorithm could achieve high coverage with low energy consumption and computational cost, while incrementally exploring the terrain and avoiding obstacles. This study contributes to the advancement of path planning methodologies for space exploration, paving the way for efficient, scalable and autonomous exploration of lunar environments by small rovers.
OmniLRS: A Photorealistic Simulator for Lunar Robotics
Sep 16, 2023Developing algorithms for extra-terrestrial robotic exploration has always been challenging. Along with the complexity associated with these environments, one of the main issues remains the evaluation of said algorithms. With the regained interest in lunar exploration, there is also a demand for quality simulators that will enable the development of lunar robots. % In this paper, we explain how we built a Lunar simulator based on Isaac Sim, Nvidia's robotic simulator. In this paper, we propose Omniverse Lunar Robotic-Sim (OmniLRS) that is a photorealistic Lunar simulator based on Nvidia's robotic simulator. This simulation provides fast procedural environment generation, multi-robot capabilities, along with synthetic data pipeline for machine-learning applications. It comes with ROS1 and ROS2 bindings to control not only the robots, but also the environments. This work also performs sim-to-real rock instance segmentation to show the effectiveness of our simulator for image-based perception. Trained on our synthetic data, a yolov8 model achieves performance close to a model trained on real-world data, with 5% performance gap. When finetuned with real data, the model achieves 14% higher average precision than the model trained on real-world data, demonstrating our simulator's photorealism.% to realize sim-to-real. The code is fully open-source, accessible here: https://github.com/AntoineRichard/LunarSim, and comes with demonstrations.
Integration of Vision-based Object Detection and Grasping for Articulated Manipulator in Lunar Conditions
Sep 03, 2023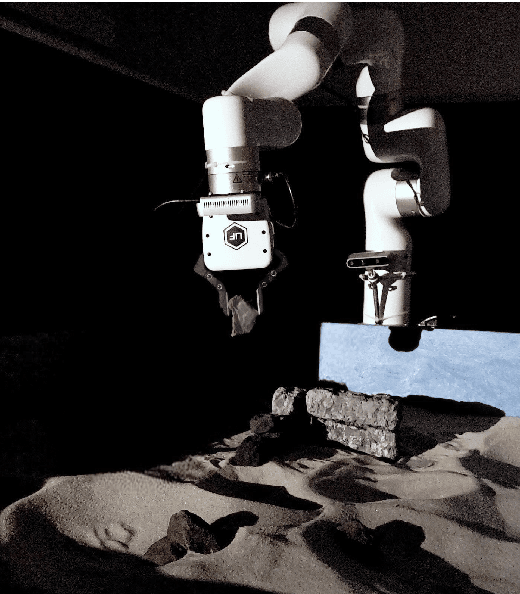



The integration of vision-based frameworks to achieve lunar robot applications faces numerous challenges such as terrain configuration or extreme lighting conditions. This paper presents a generic task pipeline using object detection, instance segmentation and grasp detection, that can be used for various applications by using the results of these vision-based systems in a different way. We achieve a rock stacking task on a non-flat surface in difficult lighting conditions with a very good success rate of 92%. Eventually, we present an experiment to assemble 3D printed robot components to initiate more complex tasks in the future.