 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Development of Modular Limbs for Reconfigurable Robots on the Moon
Jan 08, 2026In this paper, we present the development of 4-DOF robot limbs, which we call Moonbots, designed to connect in various configurations with each other and wheel modules, enabling adaptation to different environments and tasks. These modular components are intended primarily for robotic systems in space exploration and construction on the Moon in our Moonshot project. Such modular robots add flexibility and versatility for space missions where resources are constrained. Each module is driven by a common actuator characterized by a high torque-to-speed ratio, supporting both precise control and dynamic motion when required. This unified actuator design simplifies development and maintenance across the different module types. The paper describes the hardware implementation, the mechanical design of the modules, and the overall software architecture used to control and coordinate them. Additionally, we evaluate the control performance of the actuator under various load conditions to characterize its suitability for modular robot applications. To demonstrate the adaptability of the system, we introduce nine functional configurations assembled from the same set of modules: 4DOF-limb, 8DOF-limb, vehicle, dragon, minimal, quadruped, cargo, cargo-minimal, and bike. These configurations reflect different locomotion strategies and task-specific behaviors, offering a practical foundation for further research in reconfigurable robotic systems.
MoonBot: Modular and On-Demand Reconfigurable Robot Toward Moon Base Construction
Dec 26, 2025The allure of lunar surface exploration and development has recently captured widespread global attention. Robots have proved to be indispensable for exploring uncharted terrains, uncovering and leveraging local resources, and facilitating the construction of future human habitats. In this article, we introduce the modular and on-demand reconfigurable robot (MoonBot), a modular and reconfigurable robotic system engineered to maximize functionality while operating within the stringent mass constraints of lunar payloads and adapting to varying environmental conditions and task requirements. This article details the design and development of MoonBot and presents a preliminary field demonstration that validates the proof of concept through the execution of milestone tasks simulating the establishment of lunar infrastructure. These tasks include essential civil engineering operations, infrastructural component transportation and deployment, and assistive operations with inflatable modules. Furthermore, we systematically summarize the lessons learned during testing, focusing on the connector design and providing valuable insights for the advancement of modular robotic systems in future lunar missions.
Integration of Vision-based Object Detection and Grasping for Articulated Manipulator in Lunar Conditions
Sep 03, 2023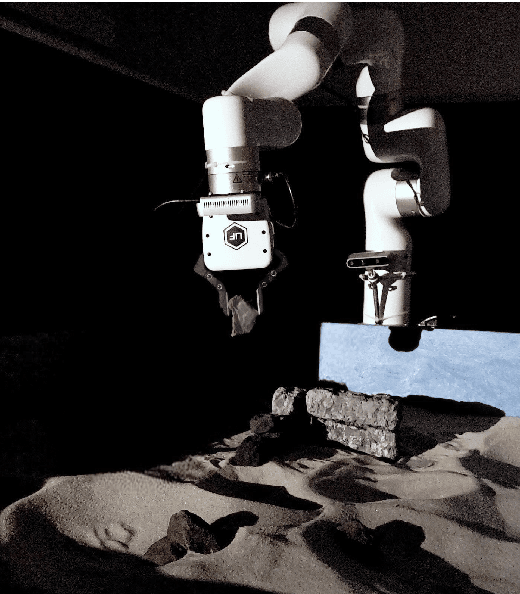



The integration of vision-based frameworks to achieve lunar robot applications faces numerous challenges such as terrain configuration or extreme lighting conditions. This paper presents a generic task pipeline using object detection, instance segmentation and grasp detection, that can be used for various applications by using the results of these vision-based systems in a different way. We achieve a rock stacking task on a non-flat surface in difficult lighting conditions with a very good success rate of 92%. Eventually, we present an experiment to assemble 3D printed robot components to initiate more complex tasks in the future.