Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegration of Vision-based Object Detection and Grasping for Articulated Manipulator in Lunar Conditions
Paper and Code
Sep 03, 2023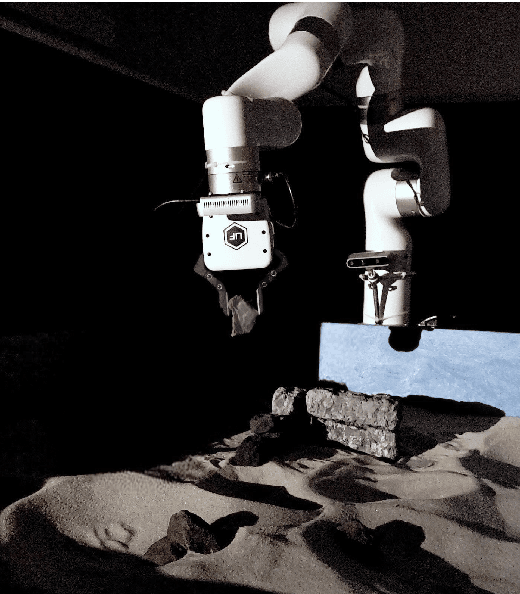



The integration of vision-based frameworks to achieve lunar robot applications faces numerous challenges such as terrain configuration or extreme lighting conditions. This paper presents a generic task pipeline using object detection, instance segmentation and grasp detection, that can be used for various applications by using the results of these vision-based systems in a different way. We achieve a rock stacking task on a non-flat surface in difficult lighting conditions with a very good success rate of 92%. Eventually, we present an experiment to assemble 3D printed robot components to initiate more complex tasks in the future.
View paper on