 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSinkage Study in Granular Material for Space Exploration Legged Robot Gripper
Nov 08, 2024
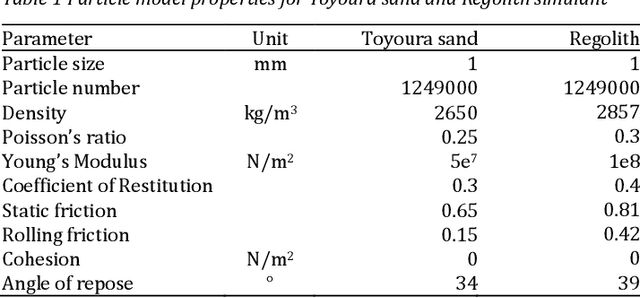


Wheeled rovers have been the primary choice for lunar exploration due to their speed and efficiency. However, deeper areas, such as lunar caves and craters, require the mobility of legged robots. To do so, appropriate end effectors must be designed to enable climbing and walking on the granular surface of the Moon. This paper investigates the behavior of an underactuated soft gripper on deformable granular material when a legged robot is walking in soft soil. A modular test bench and a simulation model were developed to observe the gripper sinkage behavior under load. The gripper uses tendon-driven fingers to match its target shape and grasp on the target surface using multiple micro-spines. The sinkage of the gripper in silica sand was measured by comparing the axial displacement of the gripper with the nominal load of the robot mass. Multiple experiments were performed to observe the sinkage of the gripper over a range of slope angles. A simulation model accounting for the degrees of compliance of the gripper fingers was created using Altair MotionSolve software and coupled to Altair EDEM to compute the gripper interaction with particles utilizing the discrete element method. After validation of the model, complementary simulations using Lunar gravity and a regolith particle model were performed. The results show that a satisfactory gripper model with accurate freedom of motion can be created in simulation using the Altair simulation packages and expected sinkage under load in a particle-filled environment can be estimated using this model. By computing the sinkage of the end effector of legged robots, the results can be directly integrated into the motion control algorithm and improve the accuracy of mobility in a granular material environment.
Modeling of Terrain Deformation by a Grouser Wheel for Lunar Rover Simulation
Aug 24, 2024Simulation of vehicle motion in planetary environments is challenging. This is due to the modeling of complex terrain, optical conditions, and terrain-aware vehicle dynamics. One of the critical issues of typical simulators is that they assume terrain is a rigid body, which limits their ability to render wheel traces and compute the wheel-terrain interactions. This prevents, for example, the use of wheel traces as landmarks for localization, as well as the accurate simulation of motion. In the context of lunar regolith, the surface is not rigid but granular. As such, there are differences in the rover's motion, such as sinkage and slippage, and a clear wheel trace left behind the rover, compared to that on a rigid terrain. This study presents a novel approach to integrating a terramechanics-aware terrain deformation engine to simulate a realistic wheel trace in a digital lunar environment. By leveraging Discrete Element Method simulation results alongside experimental single-wheel test data, we construct a regression model to derive deformation height as a function of contact normal force. The region of interest in a height map is retrieved from the wheel poses. The elevation values of corresponding pixels are subsequently modified using contact normal forces and the regression model. Finally, we apply the determined elevation change to each mesh vertex to render wheel traces during runtime. The deformation engine is integrated into our ongoing development of a lunar simulator based on NVIDIA's Omniverse IsaacSim. We hypothesize that our work will be crucial to testing perception and downstream navigation systems under conditions similar to outdoor or terrestrial fields. A demonstration video is available here: https://www.youtube.com/watch?v=TpzD0h-5hv4