 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Integral based Bayesian Smoother
Jan 12, 2025This work introduces the Gaussian integration to address a smoothing problem of a nonlinear stochastic state space model. The probability densities of states at each time instant are assumed to be Gaussian, and their means and covariances are evaluated by utilizing the odd-even properties of Gaussian integral, which are further utilized to realize Rauch-Tung-Striebel (RTS) smoothing expressions. Given that the Gaussian integration provides an exact solution for the integral of a polynomial function over a Gaussian probability density function, it is anticipated to provide more accurate results than other existing Gaussian approximation-based smoothers such as extended Kalman, cubature Kalman, and unscented Kalman smoothers, especially when polynomial types of nonlinearity are present in the state space models. The developed smoothing algorithm is applied to the Van der Pol oscillator, where the nonlinearity associated with their dynamics is represented using polynomial functions. Simulation results are provided to demonstrate the superiority of the proposed algorithm.
On Pooling-Based Track Fusion Strategies : Harmonic Mean Density
Dec 09, 2024



In a distributed sensor fusion architecture, using standard Kalman filter (naive fusion) can lead to degraded results as track correlations are ignored and conservative fusion strategies are employed as a sub-optimal alternative to the problem. Since, Gaussian mixtures provide a flexible means of modeling any density, therefore fusion strategies suitable for use with Gaussian mixtures are needed. While the generalized covariance intersection (CI) provides a means to fuse Gaussian mixtures, the procedure is cumbersome and requires evaluating a non-integer power of the mixture density. In this paper, we develop a pooling-based fusion strategy using the harmonic mean density (HMD) interpolation of local densities and show that the proposed method can handle both Gaussian and mixture densities without much changes to the framework. Mathematical properties of the proposed fusion strategy are studied and simulated on 2D and 3D maneuvering target tracking scenarios. The simulations suggest that the proposed HMD fusion performs better than other conservative strategies in terms of root-mean-squared error while being consistent.
Trigonometric Moments of a Generalized von Mises Distribution in 2-D Range-Only Tracking
Aug 07, 2024A 2D range-only tracking scenario is non-trivial due to two main reasons. First, when the states to be estimated are in Cartesian coordinates, the uncertainty region is multi-modal. The second reason is that the probability density function of azimuth conditioned on range takes the form of a generalized von Mises distribution, which is hard to tackle. Even in the case of implementing a uni-modal Kalman filter, one needs expectations of trigonometric functions of conditional bearing density, which are not available in the current literature. We prove that the trigonometric moments (circular moments) of the azimuth density conditioned on range can be computed as an infinite series, which can be sufficiently approximated by relatively few terms in summation. The solution can also be generalized to any order of the moments. This important result can provide an accurate depiction of the conditional azimuth density in 2D range-only tracking geometries. We also present a simple optimization problem that results in deterministic samples of conditional azimuth density from the knowledge of its circular moments leading to an accurate filtering solution. The results are shown in a two-dimensional simulation, where the range-only sensor platform maneuvers to make the system observable. The results prove that the method is feasible in such applications.
Dynamics of a Towed Cable with Sensor-Array for Underwater Target Motion Analysis
May 09, 2024



During a war situation, many times an underwater target motion analysis (TMA) is performed using bearing-only measurements, obtained from a sensor array, which is towed by an own-ship with the help of a connected cable. It is well known that the own-ship is required to perform a manoeuvre in order to make the system observable and localise the target successfully. During the maneuver, it is important to know the location of the sensor array with respect to the own-ship. This paper develops a dynamic model of a cable-sensor array system to localise the sensor array, which is towed behind a sea-surface vessel. We adopt a lumped-mass approach to represent the towed cable. The discretized cable elements are modelled as an interconnected rigid body, kinematically related to one another. The governing equations are derived by balancing the moments acting on each node. The derived dynamics are solved simultaneously for all the nodes to determine the orientation of the cable and sensor array. The position of the sensor array obtained from this proposed model will further be used by TMA algorithms to enhance the accuracy of the tracking system.
Maximum Correntropy Polynomial Chaos Kalman Filter for Underwater Navigation
May 09, 2024This paper develops an underwater navigation solution that utilizes a strapdown inertial navigation system (SINS) and fuses a set of auxiliary sensors such as an acoustic positioning system, Doppler velocity log, depth meter, attitude meter, and magnetometer to accurately estimate an underwater vessel's position and orientation. The conventional integrated navigation system assumes Gaussian measurement noise, while in reality, the noises are non-Gaussian, particularly contaminated by heavy-tailed impulsive noises. To address this issue, and to fuse the system model with the acquired sensor measurements efficiently, we develop a square root polynomial chaos Kalman filter based on maximum correntropy criteria. The filter is initialized using acoustic beaconing to accurately locate the initial position of the vehicle. The computational complexity of the proposed filter is calculated in terms of flops count. The proposed method is compared with the existing maximum correntropy sigma point filters in terms of estimation accuracy and computational complexity. The simulation results demonstrate an improved accuracy compared to the conventional deterministic sample point filters.
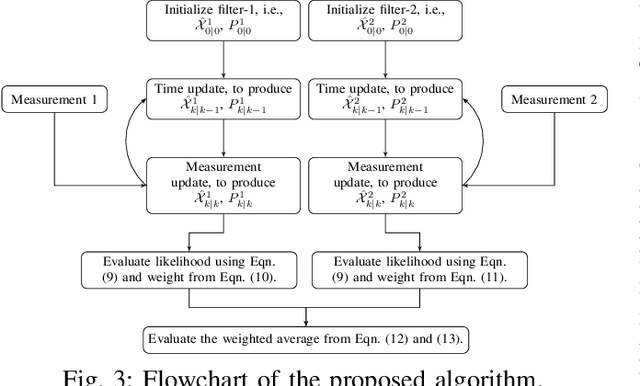
Tracking an Underwater Target with Unknown Measurement Noise Statistics Using Variational Bayesian Filters
May 15, 2023This paper considers a bearings-only tracking problem using noisy measurements of unknown noise statistics from a passive sensor. It is assumed that the process and measurement noise follows the Gaussian distribution where the measurement noise has an unknown non-zero mean and unknown covariance. Here an adaptive nonlinear filtering technique is proposed where the joint distribution of the measurement noise mean and its covariance are considered to be following normal inverse Wishart distribution (NIW). Using the variational Bayesian (VB) method the estimation technique is derived with optimized tuning parameters i.e, the confidence parameter and the initial degree of freedom of the measurement noise mean and the covariance, respectively. The proposed filtering technique is compared with the adaptive filtering techniques based on maximum likelihood and maximum aposteriori in terms of root mean square error in position and velocity, bias norm, average normalized estimation error squared, percentage of track loss, and relative execution time. Both adaptive filtering techniques are implemented using the traditional Gaussian approximate filters and are applied to a bearings-only tracking problem illustrated with moderately nonlinear and highly nonlinear scenarios to track a target following a nearly straight line path. Two cases are considered for each scenario, one when the measurement noise covariance is static and another when the measurement noise covariance is varying linearly with the distance between the target and the ownship. In this work, the proposed adaptive filters using the VB approach are found to be superior to their corresponding adaptive filters based on the maximum aposteriori and the maximum likelihood at the expense of higher computation cost.
Modeling and Estimation for Systems with Randomly Delayed Measurements and Packet Dropouts
Apr 04, 2023A networked system often uses a shared communication network to transmit the measurements to a remotely located estimation center. Due to the limited bandwidth of the channel, a delay may appear while receiving the measurements. This delay can be arbitrary step random, and packets are sometimes dropped during transmission as it exceeds a certain permissible number. In this paper, such measurements are modeled with the Poisson distribution, which allows the user to determine the maximum delay the system might suffer. When the measurement delay exceeds the permissible number, the packet dropout happens. Based on the proposed model, we solve the problem by assuming that the prior and posterior densities of states are Gaussian and derive the expression of the estimated state and the error covariance. Later, relaxing the Gaussian assumption for densities, we propose a solution with the help of the sequential Monte Carlo (SMC) approach. The proposed SMC method divides the set of particles into several groups, where each group supports the possibility that the received measurement is delayed by a certain number of steps. The strength of an individual group is determined by the probability of a measurement being delayed with the same number of steps that the group represents. This approach estimates the states and also assesses the amount of delay from the received measurements. Finally, the developed estimators are implemented on two nonlinear estimation problems, and the simulation results are compared. The proposed SMC approach shows better results compared to the designed Gaussian delay filters and existing particle filters with delay.
Risk Sensitive Filtering with Randomly Delayed Measurements
Apr 04, 2023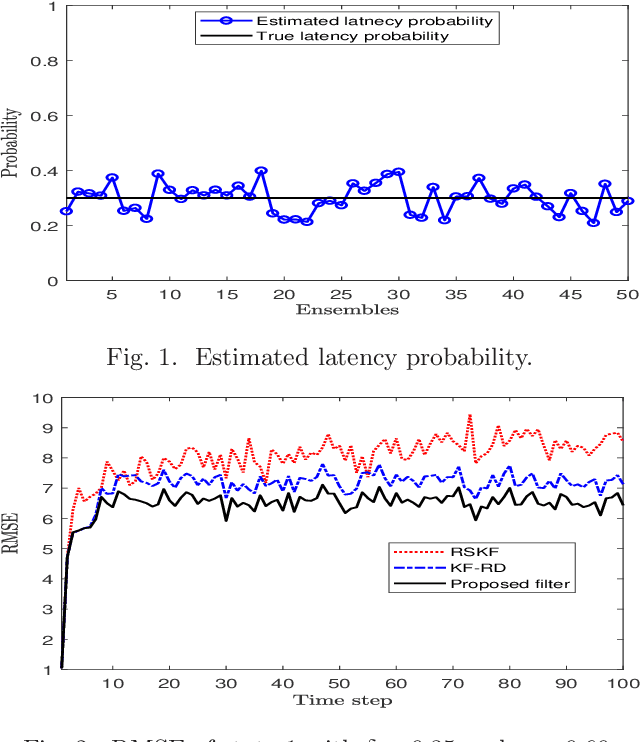



Conventional Bayesian estimation requires an accurate stochastic model of a system. However, this requirement is not always met in many practical cases where the system is not completely known or may differ from the assumed model. For such a system, we consider a scenario where the measurements are transmitted to a remote location using a common communication network and due to which, a delay is introduced while receiving the measurements. The delay that we consider here is random and one step maximum at a given time instant. For such a scenario, this paper develops a robust estimator for a linear Gaussian system by minimizing the risk sensitive error criterion that is defined as an expectation of the accumulated exponential quadratic error. The criteria for the stability of the risk sensitive Kalman filter (RSKF) are derived and the results are used to study the stability of the developed filter. Further, it is assumed that the latency probability related to delay is not known and it is estimated by maximizing the likelihood function. Simulation results suggest that the proposed filter shows acceptable performance under the nominal conditions, and it performs better than the Kalman filter for randomly delayed measurements and the RSKF in presence of both the model uncertainty and random delays.
* 15 pages and 6 Figures. The paper is published in Automatica
Robust Maximum Correntropy Kalman Filter
Feb 06, 2023The Kalman filter provides an optimal estimation for a linear system with Gaussian noise. However when the noises are non-Gaussian in nature, its performance deteriorates rapidly. For non-Gaussian noises, maximum correntropy Kalman filter (MCKF) is developed which provides an improved result. But when the system model differs from nominal consideration, the performance of the MCKF degrades. For such cases, we have proposed a new robust filtering technique which maximize a cost function defined by exponential of weighted past and present errors along with the Gaussian kernel function. By solving this cost criteria we have developed prior and posterior mean and covariance matrix propagation equations. By maximizing the correntropy function of error matrix, we have selected the kernel bandwidth value at each time step. Further the conditions for convergence of the proposed algorithm is also derived. Two numerical examples are presented to show the usefulness of the new filtering technique.
Resolving Left-Right Ambiguity During Bearing Only Tracking of an Underwater Target Using Towed Array
Feb 03, 2023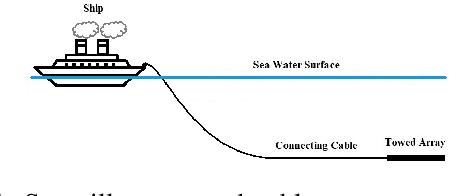
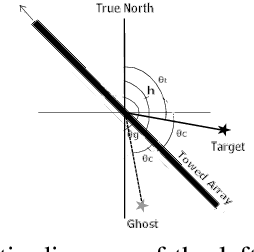
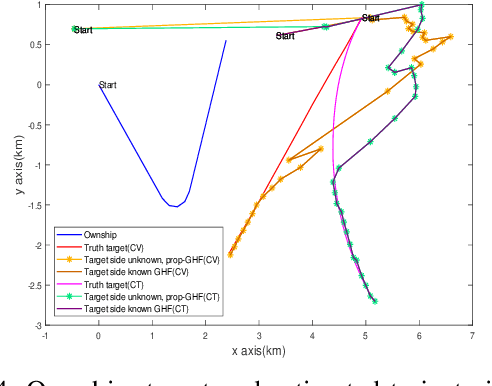
In bearing only tracking using a towed array, the array can sense the bearing angle of the target but is unable to differentiate whether the target is on the left or the right side of the array. Thus, the traditional tracking algorithm generates tracks in both the sides of the array which create difficulties when interception is required. In this paper, we propose a method based on likelihood of measurement which along with the estimators can resolve left-right ambiguity and track the target. A case study has been presented where the target moves (a) in a straight line with a near constant velocity, (b) maneuvers with a turn, and observer takes a `U'-like maneuver. The method along with the various estimators has been applied which successfully resolves the ambiguity and tracks the target. Further, the tracking results are compared in terms of the root mean square error in position and velocity, bias norm, \% of track loss and the relative execution time.