 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Estimation for Systems with Randomly Delayed Measurements and Packet Dropouts
Apr 04, 2023A networked system often uses a shared communication network to transmit the measurements to a remotely located estimation center. Due to the limited bandwidth of the channel, a delay may appear while receiving the measurements. This delay can be arbitrary step random, and packets are sometimes dropped during transmission as it exceeds a certain permissible number. In this paper, such measurements are modeled with the Poisson distribution, which allows the user to determine the maximum delay the system might suffer. When the measurement delay exceeds the permissible number, the packet dropout happens. Based on the proposed model, we solve the problem by assuming that the prior and posterior densities of states are Gaussian and derive the expression of the estimated state and the error covariance. Later, relaxing the Gaussian assumption for densities, we propose a solution with the help of the sequential Monte Carlo (SMC) approach. The proposed SMC method divides the set of particles into several groups, where each group supports the possibility that the received measurement is delayed by a certain number of steps. The strength of an individual group is determined by the probability of a measurement being delayed with the same number of steps that the group represents. This approach estimates the states and also assesses the amount of delay from the received measurements. Finally, the developed estimators are implemented on two nonlinear estimation problems, and the simulation results are compared. The proposed SMC approach shows better results compared to the designed Gaussian delay filters and existing particle filters with delay.
Risk Sensitive Filtering with Randomly Delayed Measurements
Apr 04, 2023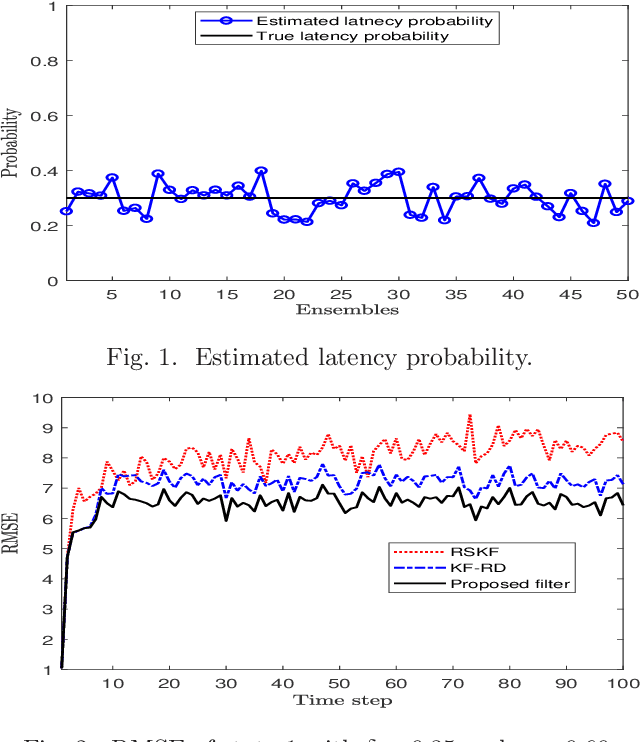



Conventional Bayesian estimation requires an accurate stochastic model of a system. However, this requirement is not always met in many practical cases where the system is not completely known or may differ from the assumed model. For such a system, we consider a scenario where the measurements are transmitted to a remote location using a common communication network and due to which, a delay is introduced while receiving the measurements. The delay that we consider here is random and one step maximum at a given time instant. For such a scenario, this paper develops a robust estimator for a linear Gaussian system by minimizing the risk sensitive error criterion that is defined as an expectation of the accumulated exponential quadratic error. The criteria for the stability of the risk sensitive Kalman filter (RSKF) are derived and the results are used to study the stability of the developed filter. Further, it is assumed that the latency probability related to delay is not known and it is estimated by maximizing the likelihood function. Simulation results suggest that the proposed filter shows acceptable performance under the nominal conditions, and it performs better than the Kalman filter for randomly delayed measurements and the RSKF in presence of both the model uncertainty and random delays.
* 15 pages and 6 Figures. The paper is published in Automatica
Resolving Left-Right Ambiguity During Bearing Only Tracking of an Underwater Target Using Towed Array
Feb 03, 2023
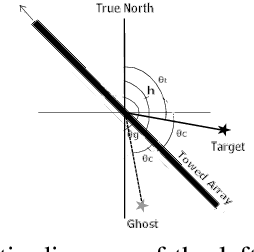
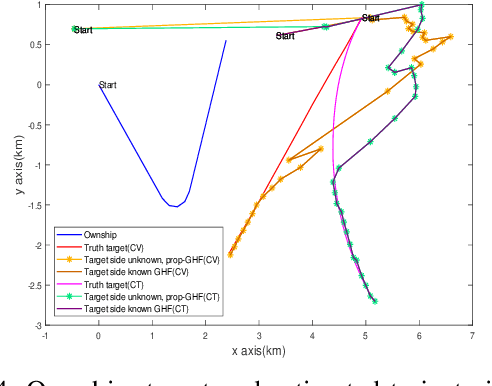
In bearing only tracking using a towed array, the array can sense the bearing angle of the target but is unable to differentiate whether the target is on the left or the right side of the array. Thus, the traditional tracking algorithm generates tracks in both the sides of the array which create difficulties when interception is required. In this paper, we propose a method based on likelihood of measurement which along with the estimators can resolve left-right ambiguity and track the target. A case study has been presented where the target moves (a) in a straight line with a near constant velocity, (b) maneuvers with a turn, and observer takes a `U'-like maneuver. The method along with the various estimators has been applied which successfully resolves the ambiguity and tracks the target. Further, the tracking results are compared in terms of the root mean square error in position and velocity, bias norm, \% of track loss and the relative execution time.