 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Lagrangian Neural Networks into the Dyna Framework for Reinforcement Learning
Mar 09, 2026Model-based reinforcement learning (MBRL) is sample-efficient but depends on the accuracy of the learned dynamics, which are often modeled using black-box methods that do not adhere to physical laws. Those methods tend to produce inaccurate predictions when presented with data that differ from the original training set. In this work, we employ Lagrangian neural networks (LNNs), which enforce an underlying Lagrangian structure to train the model within a Dyna-based MBRL framework. Furthermore, we train the LNN using stochastic gradient-based and state-estimation-based optimizers to learn the network's weights. The state-estimation-based method converges faster than the stochastic gradient-based method during neural network training. Simulation results are provided to illustrate the effectiveness of the proposed LNN-based Dyna framework for MBRL.
Tracking an Underwater Target with Unknown Measurement Noise Statistics Using Variational Bayesian Filters
May 15, 2023This paper considers a bearings-only tracking problem using noisy measurements of unknown noise statistics from a passive sensor. It is assumed that the process and measurement noise follows the Gaussian distribution where the measurement noise has an unknown non-zero mean and unknown covariance. Here an adaptive nonlinear filtering technique is proposed where the joint distribution of the measurement noise mean and its covariance are considered to be following normal inverse Wishart distribution (NIW). Using the variational Bayesian (VB) method the estimation technique is derived with optimized tuning parameters i.e, the confidence parameter and the initial degree of freedom of the measurement noise mean and the covariance, respectively. The proposed filtering technique is compared with the adaptive filtering techniques based on maximum likelihood and maximum aposteriori in terms of root mean square error in position and velocity, bias norm, average normalized estimation error squared, percentage of track loss, and relative execution time. Both adaptive filtering techniques are implemented using the traditional Gaussian approximate filters and are applied to a bearings-only tracking problem illustrated with moderately nonlinear and highly nonlinear scenarios to track a target following a nearly straight line path. Two cases are considered for each scenario, one when the measurement noise covariance is static and another when the measurement noise covariance is varying linearly with the distance between the target and the ownship. In this work, the proposed adaptive filters using the VB approach are found to be superior to their corresponding adaptive filters based on the maximum aposteriori and the maximum likelihood at the expense of higher computation cost.
Resolving Left-Right Ambiguity During Bearing Only Tracking of an Underwater Target Using Towed Array
Feb 03, 2023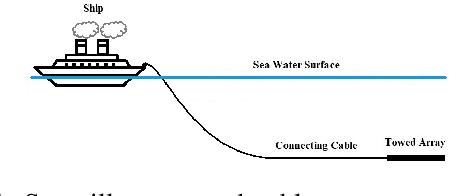
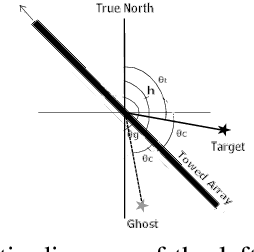
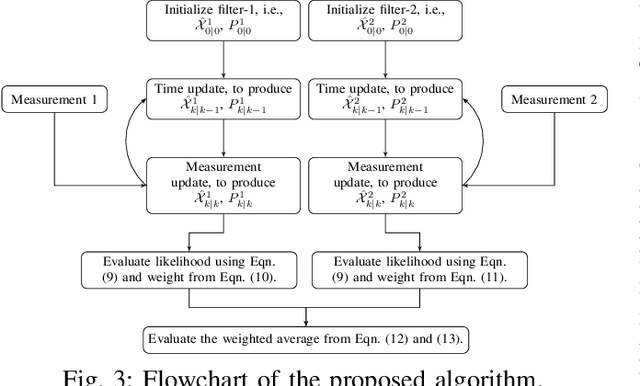
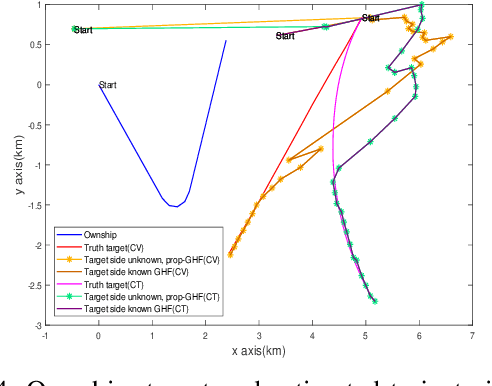
In bearing only tracking using a towed array, the array can sense the bearing angle of the target but is unable to differentiate whether the target is on the left or the right side of the array. Thus, the traditional tracking algorithm generates tracks in both the sides of the array which create difficulties when interception is required. In this paper, we propose a method based on likelihood of measurement which along with the estimators can resolve left-right ambiguity and track the target. A case study has been presented where the target moves (a) in a straight line with a near constant velocity, (b) maneuvers with a turn, and observer takes a `U'-like maneuver. The method along with the various estimators has been applied which successfully resolves the ambiguity and tracks the target. Further, the tracking results are compared in terms of the root mean square error in position and velocity, bias norm, \% of track loss and the relative execution time.