 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine Grained Analysis and Optimization of Large Scale Automotive Radar Networks
Nov 30, 2024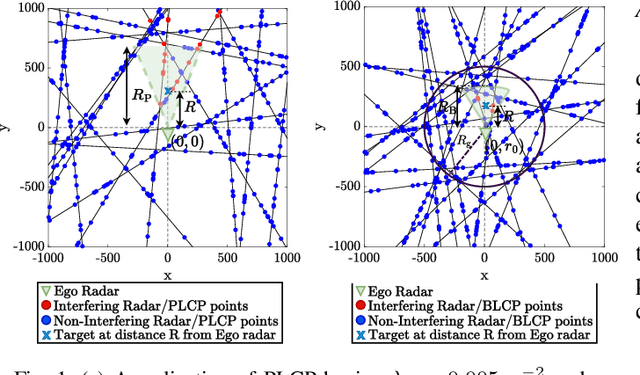
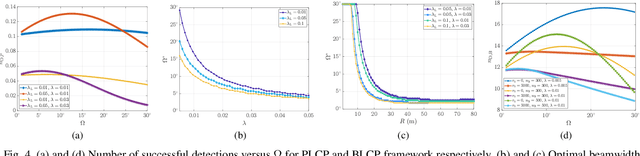
Advanced driver assistance systems (ADAS) enabled by automotive radars have significantly enhanced vehicle safety and driver experience. However, the extensive use of radars in dense road conditions introduces mutual interference, which degrades detection accuracy and reliability. Traditional interference models are limited to simple highway scenarios and cannot characterize the performance of automotive radars in dense urban environments. In our prior work, we employed stochastic geometry (SG) to develop two automotive radar network models: the Poisson line Cox process (PLCP) for dense city centers and smaller urban zones and the binomial line Cox process (BLCP) to encompass both urban cores and suburban areas. In this work, we introduce the meta-distribution (MD) framework upon these two models to distinguish the sources of variability in radar detection metrics. Additionally, we optimize the radar beamwidth and transmission probability to maximize the number of successful detections of a radar node in the network. Further, we employ a computationally efficient Chebyshev-Markov (CM) bound method for reconstructing MDs, achieving higher accuracy than the conventional Gil-Pelaez theorem. Using the framework, we analyze the specific impacts of beamwidth, detection range, and interference on radar detection performance and offer practical insights for developing adaptive radar systems tailored to diverse traffic and environmental conditions.
Impact of Urban Street Geometry on the Detection Probability of Automotive Radars
Dec 09, 2023

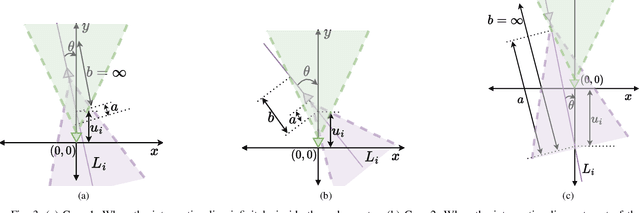
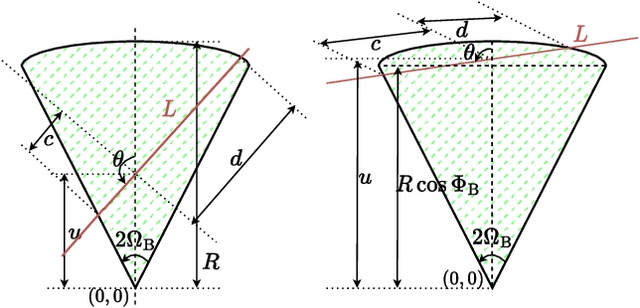
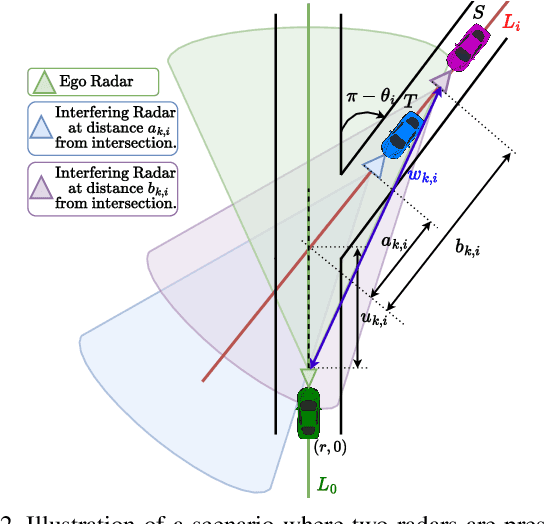
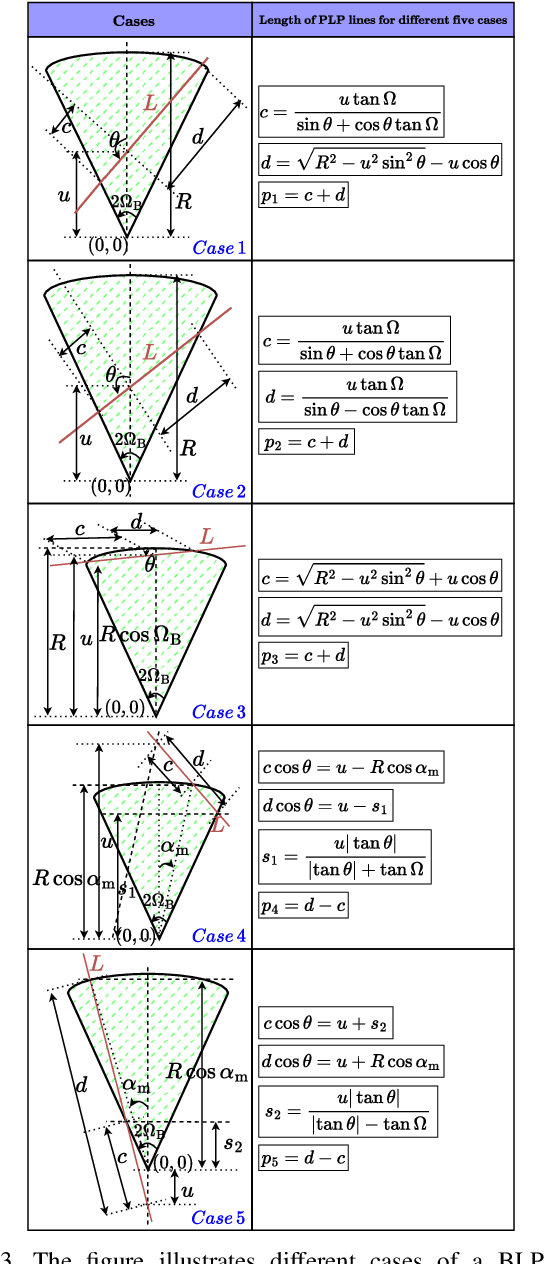
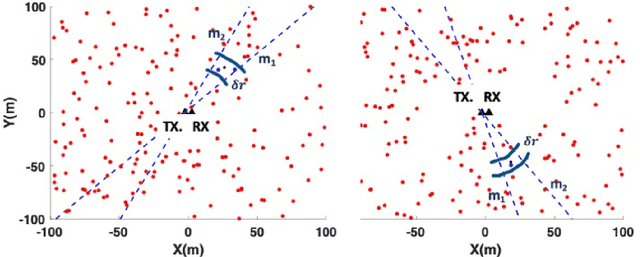
Prior works have analyzed the performance of millimeter wave automotive radars in the presence of diverse clutter and interference scenarios using stochastic geometry tools instead of more time-consuming measurement studies or system-level simulations. In these works, the distributions of radars or discrete clutter scatterers were modeled as Poisson point processes in the Euclidean space. However, since most automotive radars are likely to be mounted on vehicles and road infrastructure, road geometries are an important factor that must be considered. Instead of considering each road geometry as an individual case for study, in this work, we model each case as a specific instance of an underlying Poisson line process and further model the distribution of vehicles on the road as a Poisson point process - forming a Poisson line Cox process. Then, through the use of stochastic geometry tools, we estimate the average number of interfering radars for specific road and vehicular densities and the effect of radar parameters such as noise and beamwidth on the radar detection metrics. The numerical results are validated with Monte Carlo simulations.
Radar Enhanced Multi-Armed Bandit for Rapid Beam Selection in Millimeter Wave Communications
Jun 29, 2023Multi-arm bandit (MAB) algorithms have been used to learn optimal beams for millimeter wave communication systems. Here, the complexity of learning the optimal beam linearly scales with the number of beams, leading to high latency when there are a large number of beams. In this work, we propose to integrate radar with communication to enhance the MAB learning performance by searching only those beams where the radar detects a scatterer. Further, we use radar to distinguish the beams that show mobile targets from those which indicate the presence of static clutter, thereby reducing the number of beams to scan. Simulations show that our proposed radar-enhanced MAB reduces the exploration time by searching only the beams with distinct radar mobile targets resulting in improved throughput.
Hardware Software Co-Design Based Reconfigurable Radar Signal Processing Accelerator for Joint Radar-Communication System
Mar 03, 2023Millimeter wave (mmW) codesigned 802.11ad-based joint radar communication (JRC) systems have been identified as a potential solution for realizing high bandwidth connected vehicles for next-generation intelligent transportation systems. The radar functionality within the JRC enables accurate detection and localization of mobile targets, which can significantly speed up the selection of the optimal high-directional narrow beam required for mmW communications between the base station and mobile target. To bring JRC to reality, a radar signal processing (RSP) accelerator, co-located with the wireless communication physical layer (PHY), on edge platforms is desired. In this work, we discuss the three-dimensional digital hardware RSP framework for 802.11ad-based JRC to detect the range, azimuth, and Doppler velocity of multiple targets. We present a novel efficient reconfigurable architecture for RSP on multi-processor system-on-chip (MPSoC) via hardware-software co-design, word-length optimization, and serial-parallel configurations. We demonstrate the functional correctness of the proposed fixed-point architecture and significant savings in resource utilization (~40-70), execution time (1.5x improvement), and power consumption (50%) over floating-point architecture. The acceleration on hardware offers a 120-factor improvement in execution time over the benchmark Quad-core processor. The proposed architecture enables on-the-fly reconfigurability to support different azimuth precision and Doppler velocity resolution, offering a real-time trade-off between functional accuracy and detection time. We demonstrate end-to-end RSP on MPSoC with a user-friendly graphical user interface (GUI).
Estimation of Electrical Characteristics of Inhomogeneous Walls Using Generative Adversarial Networks
Sep 29, 2022

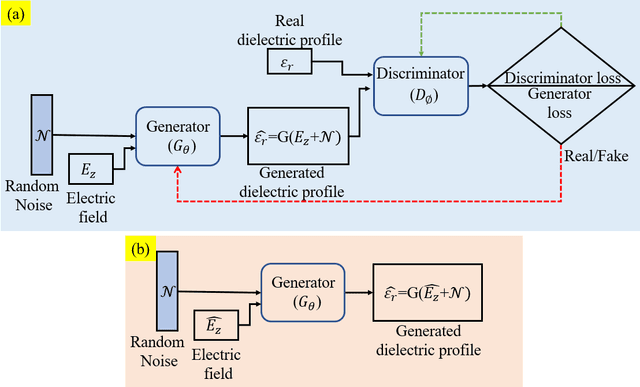
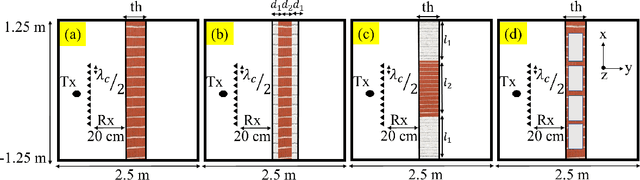
Through-wall radars are researched and developed for the detection, localization, and tracking of human activities in indoor environments. Electromagnetic wave propagation through walls introduces refraction, attenuation, multipath, and ghost targets in the radar signatures. Estimation of wall characteristics (dielectric profile and thickness) can enable wall effects to be deconvolved from through-wall radar signatures. We propose to use generative adversarial networks (GAN) to estimate wall characteristics from narrowband scattered electric fields on the same side of the wall as the transmitter. We demonstrate that the GANs, consisting of two neural networks configured in an adversarial manner, are capable of solving the highly nonlinear regression problem with limited training data to estimate the dielectric profile and thickness of actual walls up to 95\% accuracy based on training with simulated data generated from full-wave solvers.
Circularly Polarized Fabry-Perot Cavity Sensing Antenna Design using Generative Model
Sep 29, 2022



We consider the problem of designing a circularly polarized Fabry-P'erot cavity (FPC) antenna for S-band sensing applications. The spatial distribution of peripheral roughness of the unit cell of FPC's partially reflecting surface serves as an important design optimization criterion. However, the evaluation of each candidate design using a full-wave solver is computationally expensive. To this end, we propose a deep generative adversarial network (GAN) for realizing a surrogate model that is trained with input-output pairs of antenna designs and their corresponding patterns. Using the GAN framework, we quickly evaluate the characteristics of a large volume of candidate designs and choose the antenna design with an axial ratio of 0.4 dB, gain of 7.5 dB and, bandwidth of 269 MHz.
Fusion of Inverse Synthetic Aperture Radar and Camera Images for Automotive Target Tracking
Sep 27, 2022

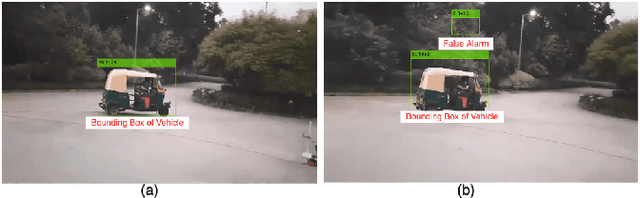

Automotive targets undergoing turns in road junctions offer large synthetic apertures over short dwell times to automotive radars that can be exploited for obtaining fine cross-range resolution. Likewise, the wide bandwidths of the automotive radar signal yield high-range resolution profiles. Together, they are exploited for generating inverse synthetic aperture radar (ISAR) images that offer rich information regarding the target vehicle's size, shape, and trajectory which is useful for object recognition and classification. However, a key requirement for ISAR is translation motion compensation and estimation of the turning velocity of the target. State-of-the-art algorithms for motion compensation trade-off between computational complexity and accuracy. An alternative low complexity method is to use an additional sensor for tracking the target motion. In this work, we propose to exploit computer vision algorithms to identify the radar target object in the sensor field-of-view (FoV) with high accuracy. Further, we propose to track the target vehicle's motion through fusion of vision and radar data. Vision data facilitates the accurate estimation of the lateral position of the target which complements the radar capability of accurate estimation of range and radial velocity. Through simulations and experimental evaluations with a monocular camera and Texas Instrument millimeter wave radar we demonstrate the effectiveness of sensor fusion for accurate target tracking for translational motion compensation and the generation of high-quality ISAR images.
IEEE 802.11ad Based Joint Radar Communication Transceiver: Design, Prototype and Performance Analysis
Sep 09, 2022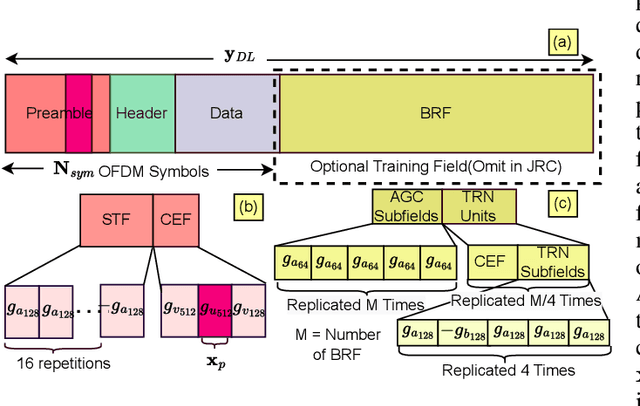
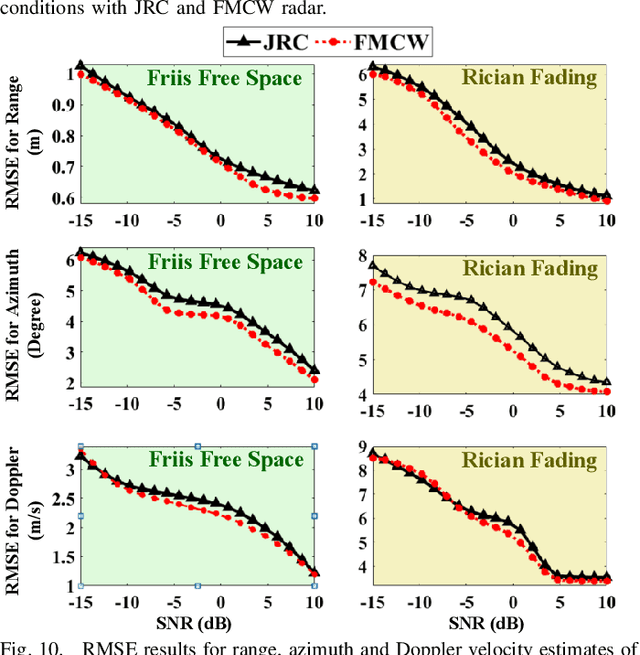

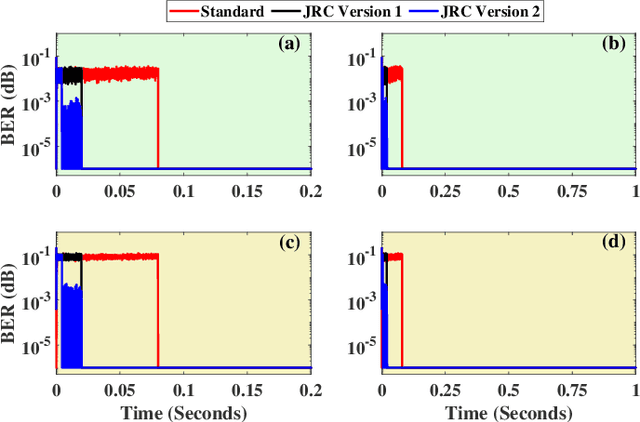
Rapid beam alignment is required to support high gain millimeter wave (mmW) communication links between a base station (BS) and mobile users (MU). The standard IEEE 802.11ad protocol enables beam alignment at the BS and MU through a lengthy beam training procedure accomplished through additional packet overhead. However, this results in reduced latency and throughput. Auxiliary radar functionality embedded within the communication protocol has been proposed in prior literature to enable rapid beam alignment of communication beams without the requirement of channel overheads. In this work, we propose a complete architectural framework of a joint radar-communication wireless transceiver wherein radar based detection of MU is realized to enable subsequent narrow beam communication. We provide a software prototype implementation with transceiver design details, signal models and signal processing algorithms. The prototype is experimentally evaluated with realistic simulations in free space and Rician propagation conditions and demonstrated to accelerate the beam alignment by a factor of four while reducing the overall bit error rate (BER) resulting in significant improvement in throughput with respect to standard 802.11ad. Likewise, the radar performance is found to be comparable to commonly used mmW radars.
Estimation of Bistatic Radar Detection Performance Under Discrete Clutter Conditions Using Stochastic Geometry
Jan 24, 2022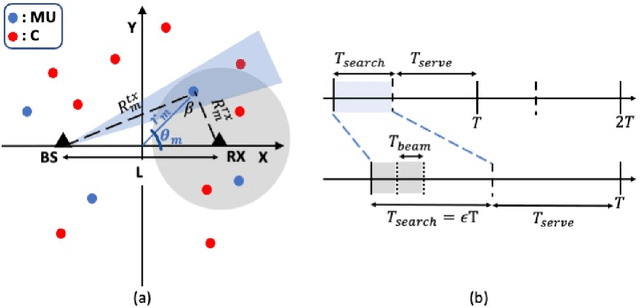
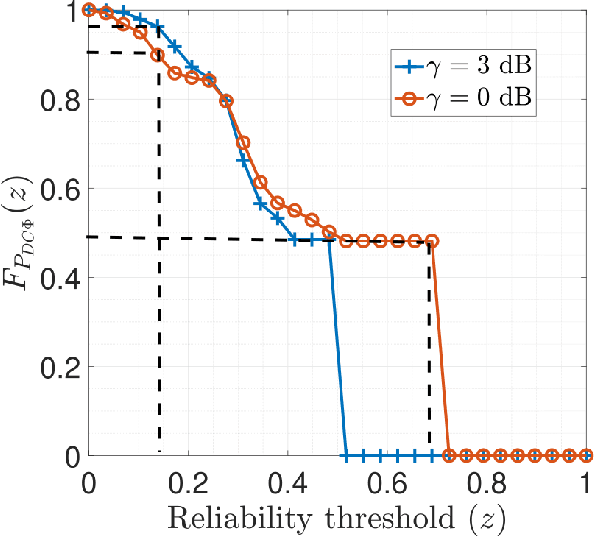

We propose a metric called the bistatic radar detection coverage probability to evaluate the detection performance of a bistatic radar under discrete clutter conditions. Such conditions are commonly encountered in indoor and outdoor environments where passive radars receivers are deployed with opportunistic illuminators. Backscatter and multipath from the radar environment give rise to ghost targets and point clutter responses in the radar signatures resulting in deterioration in the detection performance. In our work, we model the clutter points as a Poisson point process to account for the diversity in their number and spatial distribution. Using stochastic geometry formulations we provide an analytical framework to estimate the probability that the signal to clutter and noise ratio from a target at any particular position in the bistatic radar plane is above a predefined threshold. Using the metric, we derive key radar system perspectives regarding the radar performance under noise and clutter limited conditions; the range at which the bistatic radar framework can be approximated to a monostatic framework; and the optimal radar transmitted power and bandwidth. Our theoretical results are experimentally validated with Monte Carlo simulations.
Optimization of Network Throughput of Joint Radar Communication System Using Stochastic Geometry
Jan 24, 2022



Recently joint radar communication (JRC) systems have gained considerable interest for several applications such as vehicular communications, indoor localization and activity recognition, covert military communications, and satellite-based remote sensing. In these frameworks, bistatic/passive radar deployments with directional beams explore the angular search space and identify mobile users/radar targets. Subsequently, directional communication links are established with these mobile users. Consequently, JRC parameters such as the time trade-off between the radar exploration and communication service tasks have direct implications on the network throughput. Using tools from stochastic geometry (SG), we derive several system design and planning insights for deploying such networks and demonstrate how efficient radar detection can augment the communication throughput in a JRC system. Specifically, we provide a generalized analytical framework to maximize the network throughput by optimizing JRC parameters such as the exploration/exploitation duty cycle, the radar bandwidth, the transmit power, and the pulse repetition interval. The analysis is further extended to monostatic radar conditions, which is a special case in our framework. The theoretical results are experimentally validated through Monte Carlo simulations. Our analysis highlights that for a larger bistatic range, lower operating bandwidth and a higher duty cycle must be employed to maximize the network throughput. Furthermore, we demonstrate how a reduced success in radar detection due to higher clutter density deteriorates the overall network throughput. Finally, we show peak reliability of 70% of the JRC link metrics for a single bistatic transceiver configuration.