 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA$^2$TG: Adaptive Anisotropic Textured Gaussians for Efficient 3D Scene Representation
Jan 14, 2026Gaussian Splatting has emerged as a powerful representation for high-quality, real-time 3D scene rendering. While recent works extend Gaussians with learnable textures to enrich visual appearance, existing approaches allocate a fixed square texture per primitive, leading to inefficient memory usage and limited adaptability to scene variability. In this paper, we introduce adaptive anisotropic textured Gaussians (A$^2$TG), a novel representation that generalizes textured Gaussians by equipping each primitive with an anisotropic texture. Our method employs a gradient-guided adaptive rule to jointly determine texture resolution and aspect ratio, enabling non-uniform, detail-aware allocation that aligns with the anisotropic nature of Gaussian splats. This design significantly improves texture efficiency, reducing memory consumption while enhancing image quality. Experiments on multiple benchmark datasets demonstrate that A TG consistently outperforms fixed-texture Gaussian Splatting methods, achieving comparable rendering fidelity with substantially lower memory requirements.
LOBE-GS: Load-Balanced and Efficient 3D Gaussian Splatting for Large-Scale Scene Reconstruction
Oct 02, 20253D Gaussian Splatting (3DGS) has established itself as an efficient representation for real-time, high-fidelity 3D scene reconstruction. However, scaling 3DGS to large and unbounded scenes such as city blocks remains difficult. Existing divide-and-conquer methods alleviate memory pressure by partitioning the scene into blocks, but introduce new bottlenecks: (i) partitions suffer from severe load imbalance since uniform or heuristic splits do not reflect actual computational demands, and (ii) coarse-to-fine pipelines fail to exploit the coarse stage efficiently, often reloading the entire model and incurring high overhead. In this work, we introduce LoBE-GS, a novel Load-Balanced and Efficient 3D Gaussian Splatting framework, that re-engineers the large-scale 3DGS pipeline. LoBE-GS introduces a depth-aware partitioning method that reduces preprocessing from hours to minutes, an optimization-based strategy that balances visible Gaussians -- a strong proxy for computational load -- across blocks, and two lightweight techniques, visibility cropping and selective densification, to further reduce training cost. Evaluations on large-scale urban and outdoor datasets show that LoBE-GS consistently achieves up to $2\times$ faster end-to-end training time than state-of-the-art baselines, while maintaining reconstruction quality and enabling scalability to scenes infeasible with vanilla 3DGS.
PolyNet: Polynomial Neural Network for 3D Shape Recognition with PolyShape Representation
Oct 15, 2021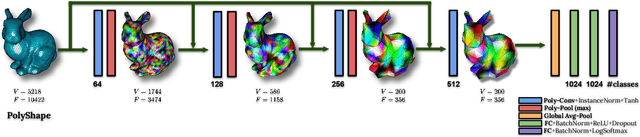
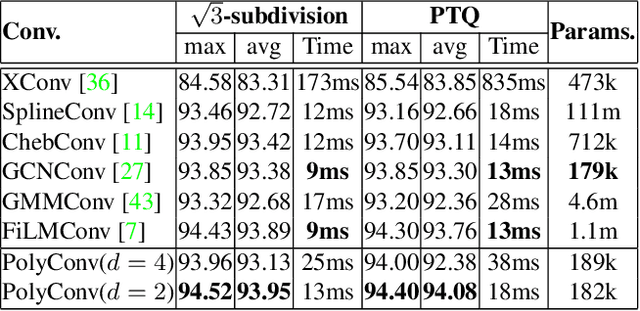
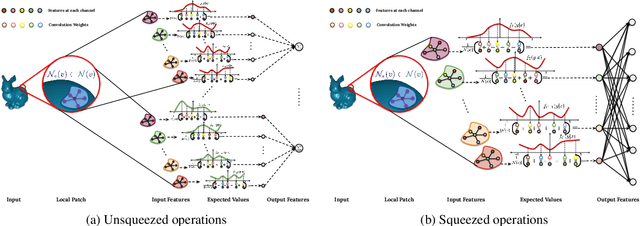
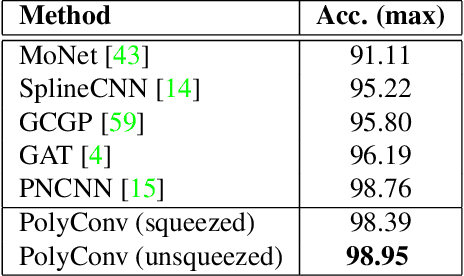
3D shape representation and its processing have substantial effects on 3D shape recognition. The polygon mesh as a 3D shape representation has many advantages in computer graphics and geometry processing. However, there are still some challenges for the existing deep neural network (DNN)-based methods on polygon mesh representation, such as handling the variations in the degree and permutations of the vertices and their pairwise distances. To overcome these challenges, we propose a DNN-based method (PolyNet) and a specific polygon mesh representation (PolyShape) with a multi-resolution structure. PolyNet contains two operations; (1) a polynomial convolution (PolyConv) operation with learnable coefficients, which learns continuous distributions as the convolutional filters to share the weights across different vertices, and (2) a polygonal pooling (PolyPool) procedure by utilizing the multi-resolution structure of PolyShape to aggregate the features in a much lower dimension. Our experiments demonstrate the strength and the advantages of PolyNet on both 3D shape classification and retrieval tasks compared to existing polygon mesh-based methods and its superiority in classifying graph representations of images. The code is publicly available from https://myavartanoo.github.io/polynet/.