 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibrationless Reconstruction of Uniformly-Undersampled Multi-Channel MR Data with Deep Learning Estimated ESPIRiT Maps
Oct 27, 2022Purpose: To develop a truly calibrationless reconstruction method that derives ESPIRiT maps from uniformly-undersampled multi-channel MR data by deep learning. Methods: ESPIRiT, one commonly used parallel imaging reconstruction technique, forms the images from undersampled MR k-space data using ESPIRiT maps that effectively represents coil sensitivity information. Accurate ESPIRiT map estimation requires quality coil sensitivity calibration or autocalibration data. We present a U-Net based deep learning model to estimate the multi-channel ESPIRiT maps directly from uniformly-undersampled multi-channel multi-slice MR data. The model is trained using fully-sampled multi-slice axial brain datasets from the same MR receiving coil system. To utilize subject-coil geometric parameters available for each dataset, the training imposes a hybrid loss on ESPIRiT maps at the original locations as well as their corresponding locations within the standard reference multi-slice axial stack. The performance of the approach was evaluated using publicly available T1-weighed brain and cardiac data. Results: The proposed model robustly predicted multi-channel ESPIRiT maps from uniformly-undersampled k-space data. They were highly comparable to the reference ESPIRiT maps directly computed from 24 consecutive central k-space lines. Further, they led to excellent ESPIRiT reconstruction performance even at high acceleration, exhibiting a similar level of errors and artifacts to that by using reference ESPIRiT maps. Conclusion: A new deep learning approach is developed to estimate ESPIRiT maps directly from uniformly-undersampled MR data. It presents a general strategy for calibrationless parallel imaging reconstruction through learning from coil and protocol specific data.
LaNet: Real-time Lane Identification by Learning Road SurfaceCharacteristics from Accelerometer Data
Apr 06, 2020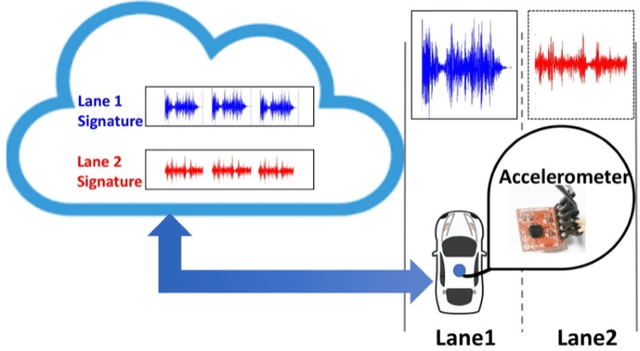
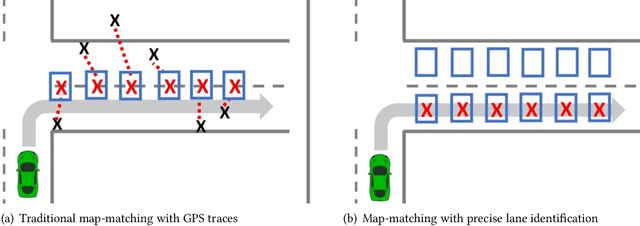
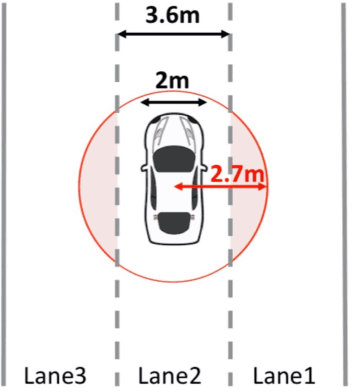
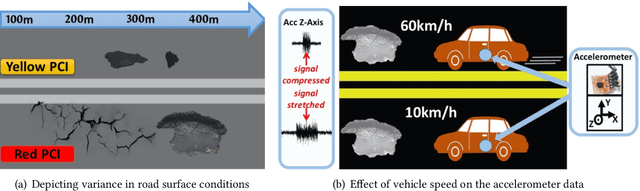
The resolution of GPS measurements, especially in urban areas, is insufficient for identifying a vehicle's lane. In this work, we develop a deep LSTM neural network model LaNet that determines the lane vehicles are on by periodically classifying accelerometer samples collected by vehicles as they drive in real time. Our key finding is that even adjacent patches of road surfaces contain characteristics that are sufficiently unique to differentiate between lanes, i.e., roads inherently exhibit differing bumps, cracks, potholes, and surface unevenness. Cars can capture this road surface information as they drive using inexpensive, easy-to-install accelerometers that increasingly come fitted in cars and can be accessed via the CAN-bus. We collect an aggregate of 60 km driving data and synthesize more based on this that capture factors such as variable driving speed, vehicle suspensions, and accelerometer noise. Our formulated LSTM-based deep learning model, LaNet, learns lane-specific sequences of road surface events (bumps, cracks etc.) and yields 100% lane classification accuracy with 200 meters of driving data, achieving over 90% with just 100 m (correspondingly to roughly one minute of driving). We design the LaNet model to be practical for use in real-time lane classification and show with extensive experiments that LaNet yields high classification accuracy even on smooth roads, on large multi-lane roads, and on drives with frequent lane changes. Since different road surfaces have different inherent characteristics or entropy, we excavate our neural network model and discover a mechanism to easily characterize the achievable classification accuracies in a road over various driving distances by training the model just once. We present LaNet as a low-cost, easily deployable and highly accurate way to achieve fine-grained lane identification.