 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegion-Adaptive Learned Hierarchical Encoding for 3D Gaussian Splatting Data
Oct 26, 2025
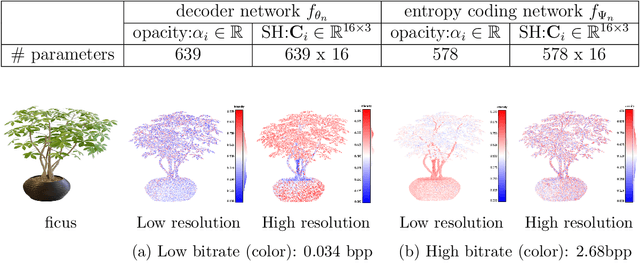
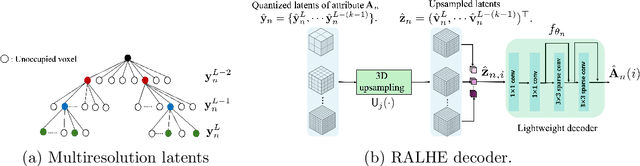

We introduce Region-Adaptive Learned Hierarchical Encoding (RALHE) for 3D Gaussian Splatting (3DGS) data. While 3DGS has recently become popular for novel view synthesis, the size of trained models limits its deployment in bandwidth-constrained applications such as volumetric media streaming. To address this, we propose a learned hierarchical latent representation that builds upon the principles of "overfitted" learned image compression (e.g., Cool-Chic and C3) to efficiently encode 3DGS attributes. Unlike images, 3DGS data have irregular spatial distributions of Gaussians (geometry) and consist of multiple attributes (signals) defined on the irregular geometry. Our codec is designed to account for these differences between images and 3DGS. Specifically, we leverage the octree structure of the voxelized 3DGS geometry to obtain a hierarchical multi-resolution representation. Our approach overfits latents to each Gaussian attribute under a global rate constraint. These latents are decoded independently through a lightweight decoder network. To estimate the bitrate during training, we employ an autoregressive probability model that leverages octree-derived contexts from the 3D point structure. The multi-resolution latents, decoder, and autoregressive entropy coding networks are jointly optimized for each Gaussian attribute. Experiments demonstrate that the proposed RALHE compression framework achieves a rendering PSNR gain of up to 2dB at low bitrates (less than 1 MB) compared to the baseline 3DGS compression methods.
Towards joint graph learning and sampling set selection from data
Dec 16, 2024


We explore the problem of sampling graph signals in scenarios where the graph structure is not predefined and must be inferred from data. In this scenario, existing approaches rely on a two-step process, where a graph is learned first, followed by sampling. More generally, graph learning and graph signal sampling have been studied as two independent problems in the literature. This work provides a foundational step towards jointly optimizing the graph structure and sampling set. Our main contribution, Vertex Importance Sampling (VIS), is to show that the sampling set can be effectively determined from the vertex importance (node weights) obtained from graph learning. We further propose Vertex Importance Sampling with Repulsion (VISR), a greedy algorithm where spatially -separated "important" nodes are selected to ensure better reconstruction. Empirical results on simulated data show that sampling using VIS and VISR leads to competitive reconstruction performance and lower complexity than the conventional two-step approach of graph learning followed by graph sampling.
Towards joint graph and sampling set selection from data
Dec 12, 2024We explore the problem of sampling graph signals in scenarios where the graph structure is not predefined and must be inferred from data. In this scenario, existing approaches rely on a two-step process, where a graph is learned first, followed by sampling. More generally, graph learning and graph signal sampling have been studied as two independent problems in the literature. This work provides a foundational step towards jointly optimizing the graph structure and sampling set. Our main contribution, Vertex Importance Sampling (VIS), is to show that the sampling set can be effectively determined from the vertex importance (node weights) obtained from graph learning. We further propose Vertex Importance Sampling with Repulsion (VISR), a greedy algorithm where spatially -separated "important" nodes are selected to ensure better reconstruction. Empirical results on simulated data show that sampling using VIS and VISR leads to competitive reconstruction performance and lower complexity than the conventional two-step approach of graph learning followed by graph sampling.
Color-Guided Flying Pixel Correction in Depth Images
Oct 10, 2024



We present a novel method to correct flying pixels within data captured by Time-of-flight (ToF) sensors. Flying pixel (FP) artifacts occur when signals from foreground and background objects reach the same sensor pixel, leading to a confident yet incorrect depth estimation in space - floating between two objects. Commercial RGB-D cameras have a complementary setup consisting of ToF sensors to capture depth in addition to RGB cameras. We propose a novel method to correct FPs by leveraging the aligned RGB and depth image in such RGB-D cameras to estimate the true depth values of FPs. Our method defines a 3D neighborhood around each point, representing a "field of view" that mirrors the acquisition process of ToF cameras. We propose a two-step iterative correction algorithm in which the FPs are first identified. Then, we estimate the true depth value of FPs by solving a least-squares optimization problem. Experimental results show that our proposed algorithm estimates the depth value of FPs as accurately as other algorithms in the literature.
Graph-based Scalable Sampling of 3D Point Cloud Attributes
Oct 01, 2024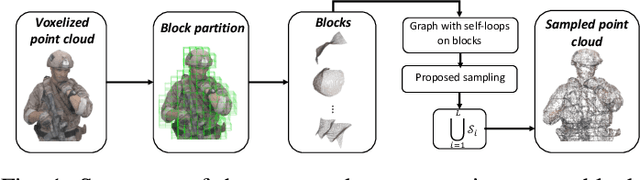
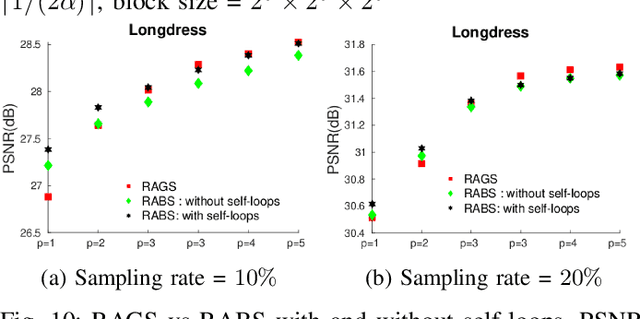
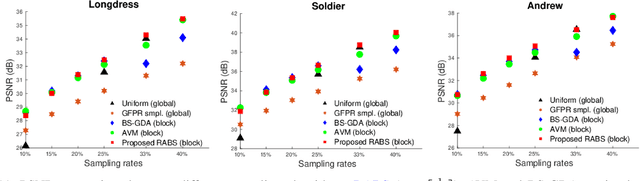
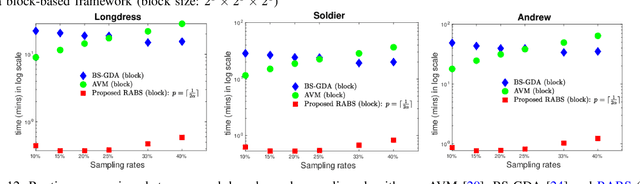
3D Point clouds (PCs) are commonly used to represent 3D scenes. They can have millions of points, making subsequent downstream tasks such as compression and streaming computationally expensive. PC sampling (selecting a subset of points) can be used to reduce complexity. Existing PC sampling algorithms focus on preserving geometry features and often do not scale to handle large PCs. In this work, we develop scalable graph-based sampling algorithms for PC color attributes, assuming the full geometry is available. Our sampling algorithms are optimized for a signal reconstruction method that minimizes the graph Laplacian quadratic form. We first develop a global sampling algorithm that can be applied to PCs with millions of points by exploiting sparsity and sampling rate adaptive parameter selection. Further, we propose a block-based sampling strategy where each block is sampled independently. We show that sampling the corresponding sub-graphs with optimally chosen self-loop weights (node weights) will produce a sampling set that approximates the results of global sampling while reducing complexity by an order of magnitude. Our empirical results on two large PC datasets show that our algorithms outperform the existing fast PC subsampling techniques (uniform and geometry feature preserving random sampling) by 2dB. Our algorithm is up to 50 times faster than existing graph signal sampling algorithms while providing better reconstruction accuracy. Finally, we illustrate the efficacy of PC attribute sampling within a compression scenario, showing that pre-compression sampling of PC attributes can lower the bitrate by 11% while having minimal effect on reconstruction.
Full reference point cloud quality assessment using support vector regression
Jun 15, 2024



Point clouds are a general format for representing realistic 3D objects in diverse 3D applications. Since point clouds have large data sizes, developing efficient point cloud compression methods is crucial. However, excessive compression leads to various distortions, which deteriorates the point cloud quality perceived by end users. Thus, establishing reliable point cloud quality assessment (PCQA) methods is essential as a benchmark to develop efficient compression methods. This paper presents an accurate full-reference point cloud quality assessment (FR-PCQA) method called full-reference quality assessment using support vector regression (FRSVR) for various types of degradations such as compression distortion, Gaussian noise, and down-sampling. The proposed method demonstrates accurate PCQA by integrating five FR-based metrics covering various types of errors (e.g., considering geometric distortion, color distortion, and point count) using support vector regression (SVR). Moreover, the proposed method achieves a superior trade-off between accuracy and calculation speed because it includes only the calculation of these five simple metrics and SVR, which can perform fast prediction. Experimental results with three types of open datasets show that the proposed method is more accurate than conventional FR-PCQA methods. In addition, the proposed method is faster than state-of-the-art methods that utilize complicated features such as curvature and multi-scale features. Thus, the proposed method provides excellent performance in terms of the accuracy of PCQA and processing speed. Our method is available from https://github.com/STAC-USC/FRSVR-PCQA.
Cylindrical coordinates for LiDAR point cloud compression
Jun 21, 2021



We present an efficient voxelization method to encode the geometry and attributes of 3D point clouds obtained from autonomous vehicles. Due to the circular scanning trajectory of sensors, the geometry of LiDAR point clouds is inherently different from that of point clouds captured from RGBD cameras. Our method exploits these specific properties to representing points in cylindrical coordinates instead of conventional Cartesian coordinates. We demonstrate thatRegion Adaptive Hierarchical Transform (RAHT) can be extended to this setting, leading to attribute encoding based on a volumetric partition in cylindrical coordinates. Experimental results show that our proposed voxelization outperforms conventional approaches based on Cartesian coordinates for this type of data. We observe a significant improvement in attribute coding performance with 5-10%reduction in bitrate and octree representation with 35-45% reduction in bits.