 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSchröMind: Mitigating Hallucinations in Multimodal Large Language Models via Solving the Schrödinger Bridge Problem
Feb 10, 2026Recent advancements in Multimodal Large Language Models (MLLMs) have achieved significant success across various domains. However, their use in high-stakes fields like healthcare remains limited due to persistent hallucinations, where generated text contradicts or ignores visual input. We contend that MLLMs can comprehend images but struggle to produce accurate token sequences. Minor perturbations can shift attention from truthful to untruthful states, and the autoregressive nature of text generation often prevents error correction. To address this, we propose SchröMind-a novel framework reducing hallucinations via solving the Schrödinger bridge problem. It establishes a token-level mapping between hallucinatory and truthful activations with minimal transport cost through lightweight training, while preserving the model's original capabilities. Extensive experiments on the POPE and MME benchmarks demonstrate the superiority of Schrödinger, which achieves state-of-the-art performance while introducing only minimal computational overhead.
Scalpel: Fine-Grained Alignment of Attention Activation Manifolds via Mixture Gaussian Bridges to Mitigate Multimodal Hallucination
Feb 10, 2026Rapid progress in large vision-language models (LVLMs) has achieved unprecedented performance in vision-language tasks. However, due to the strong prior of large language models (LLMs) and misaligned attention across modalities, LVLMs often generate outputs inconsistent with visual content - termed hallucination. To address this, we propose \textbf{Scalpel}, a method that reduces hallucination by refining attention activation distributions toward more credible regions. Scalpel predicts trusted attention directions for each head in Transformer layers during inference and adjusts activations accordingly. It employs a Gaussian mixture model to capture multi-peak distributions of attention in trust and hallucination manifolds, and uses entropic optimal transport (equivalent to Schrödinger bridge problem) to map Gaussian components precisely. During mitigation, Scalpel dynamically adjusts intervention strength and direction based on component membership and mapping relationships between hallucination and trust activations. Extensive experiments across multiple datasets and benchmarks demonstrate that Scalpel effectively mitigates hallucinations, outperforming previous methods and achieving state-of-the-art performance. Moreover, Scalpel is model- and data-agnostic, requiring no additional computation, only a single decoding step.
A Benchmark for Vision-Centric HD Mapping by V2I Systems
Mar 31, 2025



Autonomous driving faces safety challenges due to a lack of global perspective and the semantic information of vectorized high-definition (HD) maps. Information from roadside cameras can greatly expand the map perception range through vehicle-to-infrastructure (V2I) communications. However, there is still no dataset from the real world available for the study on map vectorization onboard under the scenario of vehicle-infrastructure cooperation. To prosper the research on online HD mapping for Vehicle-Infrastructure Cooperative Autonomous Driving (VICAD), we release a real-world dataset, which contains collaborative camera frames from both vehicles and roadside infrastructures, and provides human annotations of HD map elements. We also present an end-to-end neural framework (i.e., V2I-HD) leveraging vision-centric V2I systems to construct vectorized maps. To reduce computation costs and further deploy V2I-HD on autonomous vehicles, we introduce a directionally decoupled self-attention mechanism to V2I-HD. Extensive experiments show that V2I-HD has superior performance in real-time inference speed, as tested by our real-world dataset. Abundant qualitative results also demonstrate stable and robust map construction quality with low cost in complex and various driving scenes. As a benchmark, both source codes and the dataset have been released at OneDrive for the purpose of further study.
Multi-Relation Aware Temporal Interaction Network Embedding
Oct 09, 2021

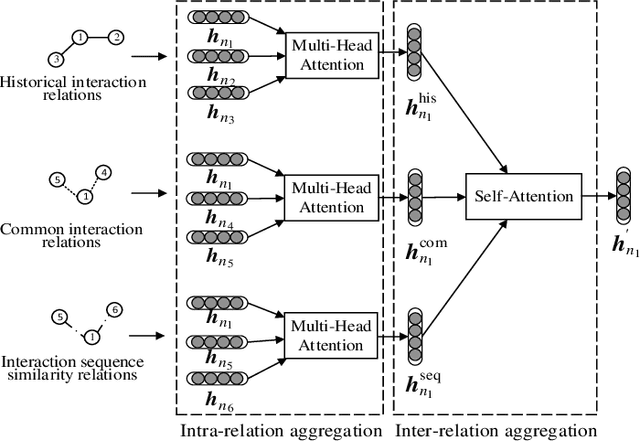

Temporal interaction networks are formed in many fields, e.g., e-commerce, online education, and social network service. Temporal interaction network embedding can effectively mine the information in temporal interaction networks, which is of great significance to the above fields. Usually, the occurrence of an interaction affects not only the nodes directly involved in the interaction (interacting nodes), but also the neighbor nodes of interacting nodes. However, existing temporal interaction network embedding methods only use historical interaction relations to mine neighbor nodes, ignoring other relation types. In this paper, we propose a multi-relation aware temporal interaction network embedding method (MRATE). Based on historical interactions, MRATE mines historical interaction relations, common interaction relations, and interaction sequence similarity relations to obtain the neighbor based embeddings of interacting nodes. The hierarchical multi-relation aware aggregation method in MRATE first employs graph attention networks (GATs) to aggregate the interaction impacts propagated through a same relation type and then combines the aggregated interaction impacts from multiple relation types through the self-attention mechanism. Experiments are conducted on three public temporal interaction network datasets, and the experimental results show the effectiveness of MRATE.
Multi-Level Visual Similarity Based Personalized Tourist Attraction Recommendation Using Geo-Tagged Photos
Sep 17, 2021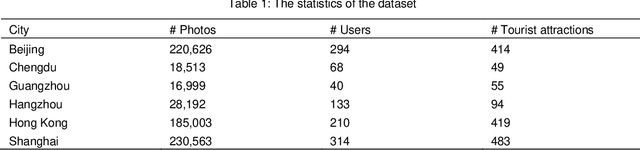
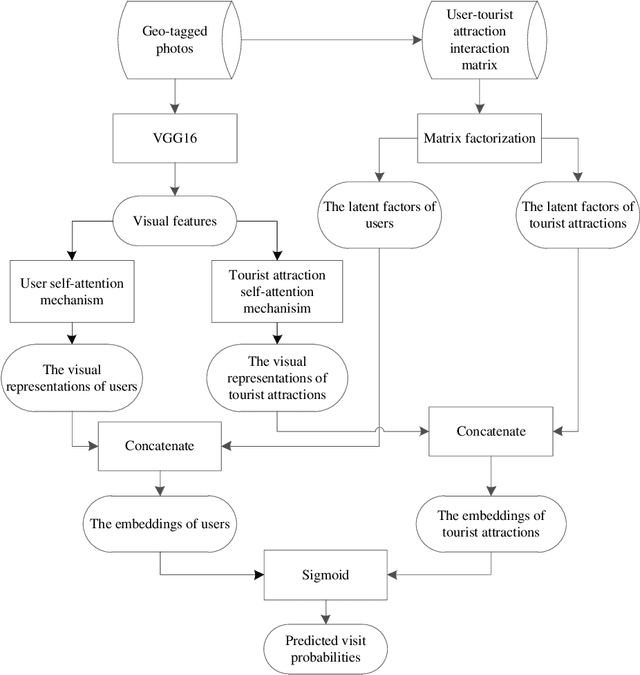
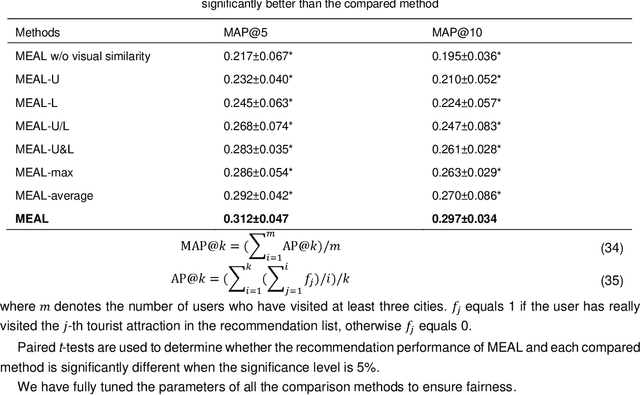

Geo-tagged photo based tourist attraction recommendation can discover users' travel preferences from their taken photos, so as to recommend suitable tourist attractions to them. However, existing visual content based methods cannot fully exploit the user and tourist attraction information of photos to extract visual features, and do not differentiate the significances of different photos. In this paper, we propose multi-level visual similarity based personalized tourist attraction recommendation using geo-tagged photos (MEAL). MEAL utilizes the visual contents of photos and interaction behavior data to obtain the final embeddings of users and tourist attractions, which are then used to predict the visit probabilities. Specifically, by crossing the user and tourist attraction information of photos, we define four visual similarity levels and introduce a corresponding quintuplet loss to embed the visual contents of photos. In addition, to capture the significances of different photos, we exploit the self-attention mechanism to obtain the visual representations of users and tourist attractions. We conducted experiments on a dataset crawled from Flickr, and the experimental results proved the advantage of this method.