 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying Damage-Sensitive Spatial Vibration Characteristics of Bridges from Widespread Smartphone Data
Nov 02, 2022The knowledge gap in the expected and actual conditions of bridges has created worldwide deficits in infrastructure service and funding challenges. Despite rapid advances over the past four decades, sensing technology is still not a part of bridge inspection protocols. Every time a vehicle with a mobile device passes over a bridge, there is an opportunity to capture potentially important structural response information at a very low cost. Prior work has shown how bridge modal frequencies can be accurately determined with crowdsourced smartphone-vehicle trip (SVT) data in real-world settings. However, modal frequencies provide very limited insight on the structural health conditions of the bridge. Here, we present a novel method to extract spatial vibration characteristics of real bridges, namely, absolute mode shapes, from crowdsourced SVT data. These characteristics have a demonstrable sensitivity to structural damage and provide superior, yet complementary, indicators of bridge condition. Furthermore, they are useful in the development of accurate mathematical models of the structural system and help reconcile the differences between models and real systems. We demonstrate successful applications on four very different bridges, with span lengths ranging from about 30 to 1300 meters, collectively representing about one quarter of bridges in the US. Supplementary work applies this computational approach to accurately detect simulated bridge damage entirely from crowdsourced SVT data in an unprecedentedly timely fashion. The results presented in this article open the way towards large-scale crowdsourced monitoring of bridge infrastructure.
RL-Controller: a reinforcement learning framework for active structural control
Mar 13, 2021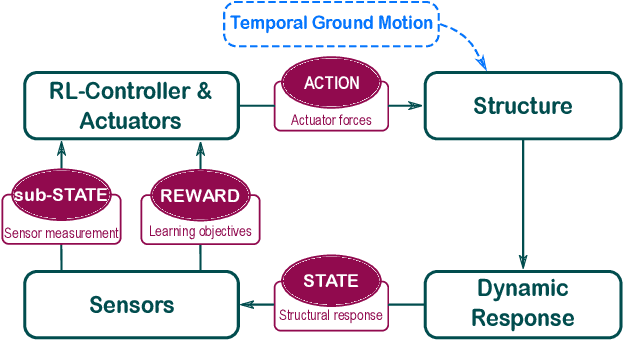
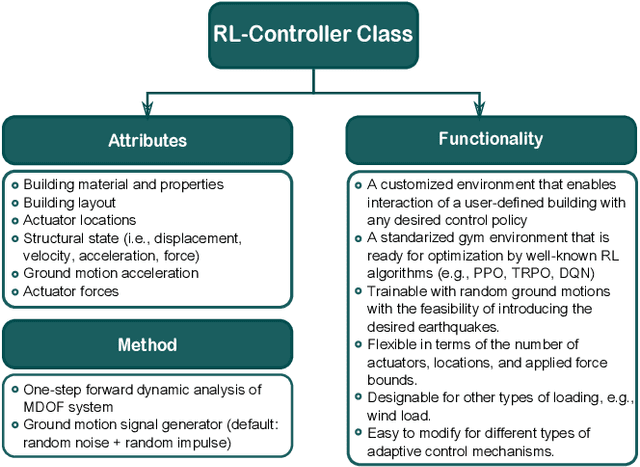
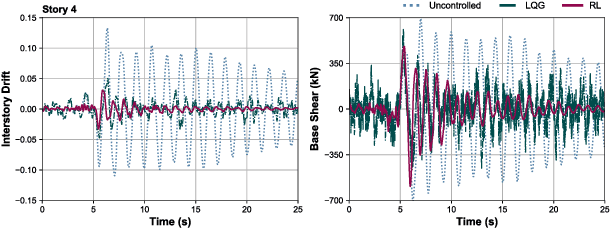
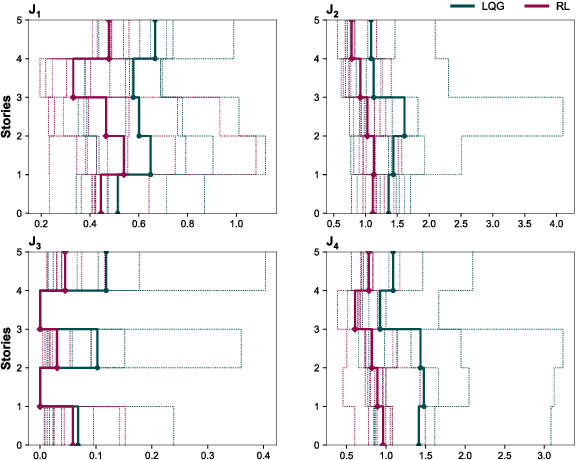
To maintain structural integrity and functionality during the designed life cycle of a structure, engineers are expected to accommodate for natural hazards as well as operational load levels. Active control systems are an efficient solution for structural response control when a structure is subjected to unexpected extreme loads. However, development of these systems through traditional means is limited by their model dependent nature. Recent advancements in adaptive learning methods, in particular, reinforcement learning (RL), for real-time decision making problems, along with rapid growth in high-performance computational resources, help structural engineers to transform the classic model-based active control problem to a purely data-driven one. In this paper, we present a novel RL-based approach for designing active controllers by introducing RL-Controller, a flexible and scalable simulation environment. The RL-Controller includes attributes and functionalities that are defined to model active structural control mechanisms in detail. We show that the proposed framework is easily trainable for a five story benchmark building with 65% reductions on average in inter story drifts (ISD) when subjected to strong ground motions. In a comparative study with LQG active control method, we demonstrate that the proposed model-free algorithm learns more optimal actuator forcing strategies that yield higher performance, e.g., 25% more ISD reductions on average with respect to LQG, without using prior information about the mechanical properties of the system.
Transfer Learning for Input Estimation of Vehicle Systems
Oct 26, 2020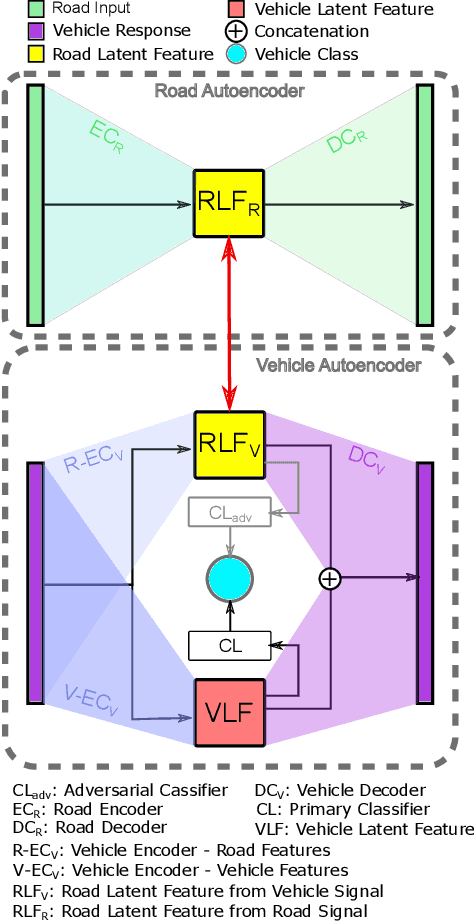
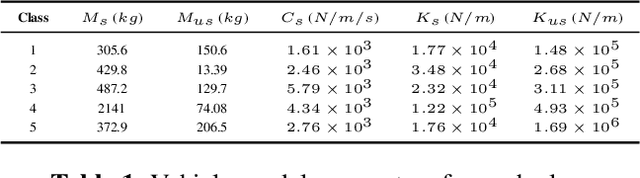
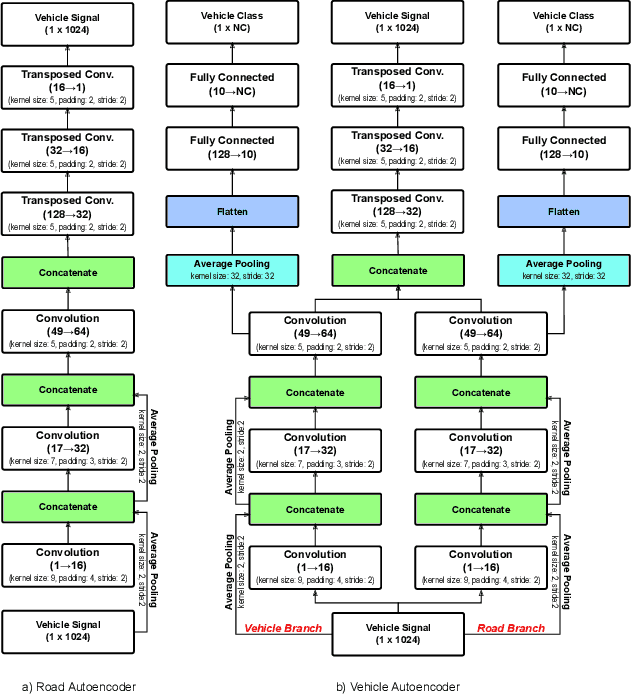
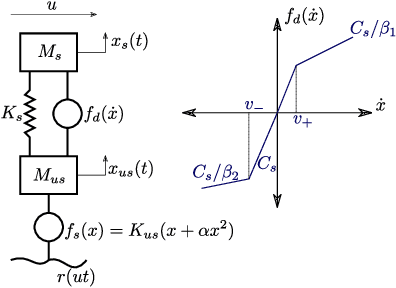
This study proposes a learning-based method with domain adaptability for input estimation of vehicle suspension systems. In a crowdsensing setting for bridge health monitoring, vehicles carry sensors to collect samples of the bridge's dynamic response. The primary challenge is in preprocessing; signals are highly contaminated from road profile roughness and vehicle suspension dynamics. Additionally, signals are collected from a diverse set of vehicles vitiating model-based approaches. In our data-driven approach, two autoencoders for the cabin signal and the tire-level signal are constrained to force the separation of the tire-level input from the suspension system in the latent state representation. From the extracted features, we estimate the tire-level signal and determine the vehicle class with high accuracy (98% classification accuracy). Compared to existing solutions for the vehicle suspension deconvolution problem, we show that the proposed methodology is robust to vehicle dynamic variations and suspension system nonlinearity.
DynNet: Physics-based neural architecture design for linear and nonlinear structural response modeling and prediction
Jul 03, 2020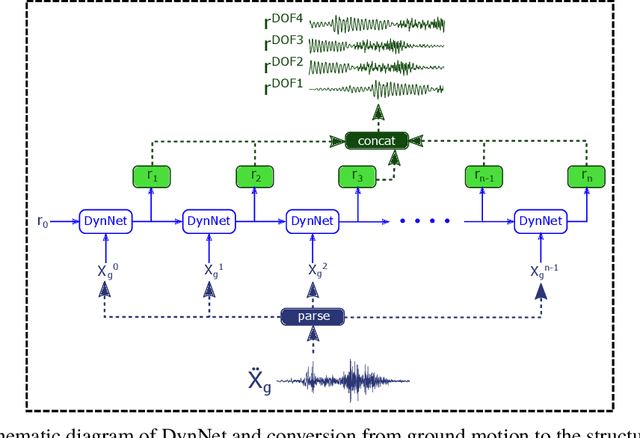
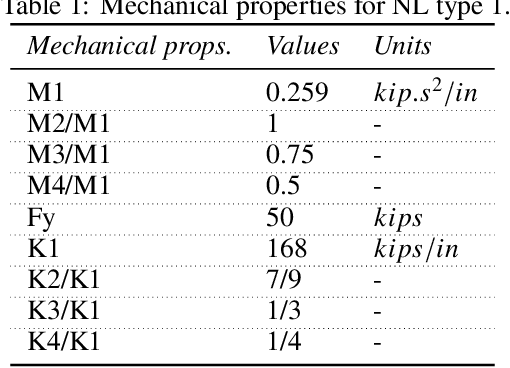
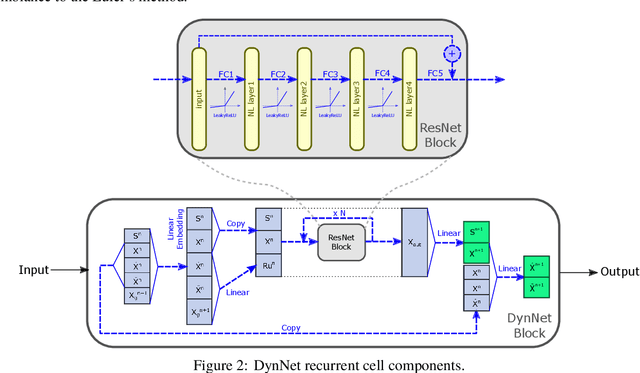
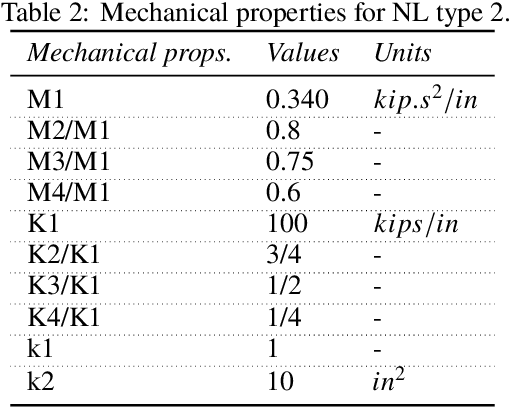
Data-driven models for predicting dynamic responses of linear and nonlinear systems are of great importance due to their wide application from probabilistic analysis to inverse problems such as system identification and damage diagnosis. In this study, a physics-based recurrent neural network model is designed that is able to learn the dynamics of linear and nonlinear multiple degrees of freedom systems given a ground motion. The model is able to estimate a complete set of responses, including displacement, velocity, acceleration, and internal forces. Compared to the most advanced counterparts, this model requires a smaller number of trainable variables while the accuracy of predictions is higher for long trajectories. In addition, the architecture of the recurrent block is inspired by differential equation solver algorithms and it is expected that this approach yields more generalized solutions. In the training phase, we propose multiple novel techniques to dramatically accelerate the learning process using smaller datasets, such as hardsampling, utilization of trajectory loss function, and implementation of a trust-region approach. Numerical case studies are conducted to examine the strength of the network to learn different nonlinear behaviors. It is shown that the network is able to capture different nonlinear behaviors of dynamic systems with very high accuracy and with no need for prior information or very large datasets.
Finite Difference Neural Networks: Fast Prediction of Partial Differential Equations
Jun 02, 2020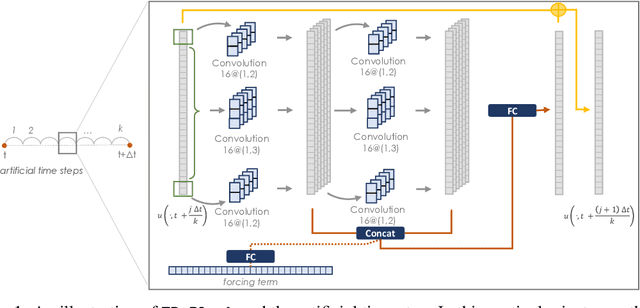
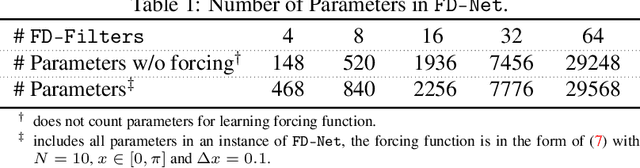
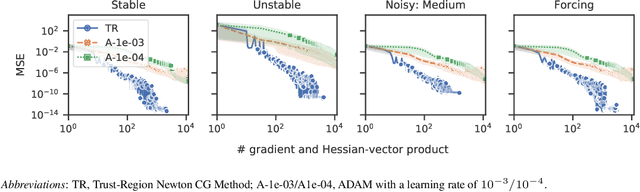
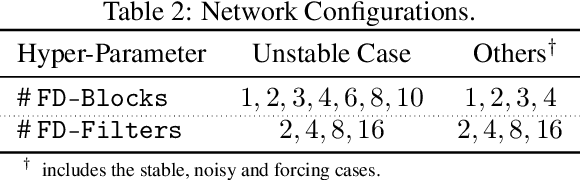
Discovering the underlying behavior of complex systems is an important topic in many science and engineering disciplines. In this paper, we propose a novel neural network framework, finite difference neural networks (FDNet), to learn partial differential equations from data. Specifically, our proposed finite difference inspired network is designed to learn the underlying governing partial differential equations from trajectory data, and to iteratively estimate the future dynamical behavior using only a few trainable parameters. We illustrate the performance (predictive power) of our framework on the heat equation, with and without noise and/or forcing, and compare our results to the Forward Euler method. Moreover, we show the advantages of using a Hessian-Free Trust Region method to train the network.