 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Harsh Truth: Segment-Level Analysis of Harsh Driving Events in Milan Using Large-Scale Telematics, Street Networks, and Google Street View
May 29, 2026Police-reported crash statistics remain the standard input for urban road-safety assessment, but their incompleteness and reporting lag limit their usefulness for timely, fine-grained intervention design. Harsh acceleration and braking events are widely used as surrogate safety indicators, but have so far been studied only in comparatively small urban samples. This study analyses harsh events across the urban road network of Milan, combining high-resolution telematics from more than 4.2 million vehicles equipped with On-Board Units, segment-level traffic metrics from TomTom, street-network and infrastructure attributes from OpenStreetMap, and visual streetscape features extracted from Google Street View via semantic segmentation using a OneFormer model. We employ an analytical framework combining non-parametric Mann--Whitney U tests of segment-feature distributions between high- and low-harshness groups with supervised machine-learning regressors. We find that, once exposure is controlled for, wider carriageways, crossings and transit stops, and more open visual fields (higher sky- and road-pixel proportions) are associated with higher harsh-event intensity, while denser built frontage is associated with lower intensity. Finally, the cycling-infrastructure case study identifies a gradient in harsh-event intensity across facility types: markings-only cycle lanes are associated with a 19.5% higher harshness score, and mixed-traffic configurations with an 11.5% higher score, relative to physically separated cycle paths, conditional on the included controls. These results support context-specific rather than uniform urban-safety interventions and illustrate how large-scale telematics combined with open geospatial and visual data can inform Vision Zero decision-making at the metropolitan scale.
EH from V2X Communications: the Price of Uncertainty and the Impact of Platooning
Dec 02, 2024In this paper, we explore how radio frequency energy from vehicular communications can be exploited by an energy harvesting device (EHD) placed alongside the road to deliver data packets through wireless connection to a remote Access Point. Based on updated local topology knowledge, we propose a cycle-based strategy to balance harvest and transmit phases at the EHD, in order to maximize the average throughput. A theoretical derivation is carried out to determine the optimal strategy parameters setting, and used to investigate the effectiveness of the proposed approach over different scenarios, taking into account the road traffic intensity, the EHD battery capacity, the transmit power and the data rate. Results show that regular traffic patterns, as those created by vehicles platooning, can increase the obtained throughput by more than 30% with respect to irregular ones with the same average intensity. Black out probability is also derived for the former scenario. The resulting tradeoff between higher average throughput and lower black out probability shows that the proposed approach can be adopted for different applications by properly tuning the strategy parameters.
* 16 pages, 15 figures
Identifying Damage-Sensitive Spatial Vibration Characteristics of Bridges from Widespread Smartphone Data
Nov 02, 2022The knowledge gap in the expected and actual conditions of bridges has created worldwide deficits in infrastructure service and funding challenges. Despite rapid advances over the past four decades, sensing technology is still not a part of bridge inspection protocols. Every time a vehicle with a mobile device passes over a bridge, there is an opportunity to capture potentially important structural response information at a very low cost. Prior work has shown how bridge modal frequencies can be accurately determined with crowdsourced smartphone-vehicle trip (SVT) data in real-world settings. However, modal frequencies provide very limited insight on the structural health conditions of the bridge. Here, we present a novel method to extract spatial vibration characteristics of real bridges, namely, absolute mode shapes, from crowdsourced SVT data. These characteristics have a demonstrable sensitivity to structural damage and provide superior, yet complementary, indicators of bridge condition. Furthermore, they are useful in the development of accurate mathematical models of the structural system and help reconcile the differences between models and real systems. We demonstrate successful applications on four very different bridges, with span lengths ranging from about 30 to 1300 meters, collectively representing about one quarter of bridges in the US. Supplementary work applies this computational approach to accurately detect simulated bridge damage entirely from crowdsourced SVT data in an unprecedentedly timely fashion. The results presented in this article open the way towards large-scale crowdsourced monitoring of bridge infrastructure.
ConiVAT: Cluster Tendency Assessment and Clustering with Partial Background Knowledge
Sep 28, 2020
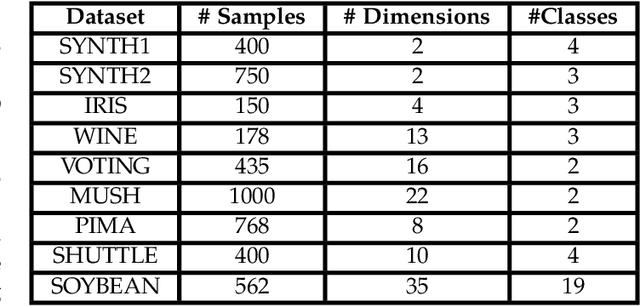

The VAT method is a visual technique for determining the potential cluster structure and the possible number of clusters in numerical data. Its improved version, iVAT, uses a path-based distance transform to improve the effectiveness of VAT for "tough" cases. Both VAT and iVAT have also been used in conjunction with a single-linkage(SL) hierarchical clustering algorithm. However, they are sensitive to noise and bridge points between clusters in the dataset, and consequently, the corresponding VAT/iVAT images are often in-conclusive for such cases. In this paper, we propose a constraint-based version of iVAT, which we call ConiVAT, that makes use of background knowledge in the form of constraints, to improve VAT/iVAT for challenging and complex datasets. ConiVAT uses the input constraints to learn the underlying similarity metric and builds a minimum transitive dissimilarity matrix, before applying VAT to it. We demonstrate ConiVAT approach to visual assessment and single linkage clustering on nine datasets to show that, it improves the quality of iVAT images for complex datasets, and it also overcomes the limitation of SL clustering with VAT/iVAT due to "noisy" bridges between clusters. Extensive experiment results on nine datasets suggest that ConiVAT outperforms the other three semi-supervised clustering algorithms in terms of improved clustering accuracy.
Driving Behavior Analysis through CAN Bus Data in an Uncontrolled Environment
Oct 09, 2017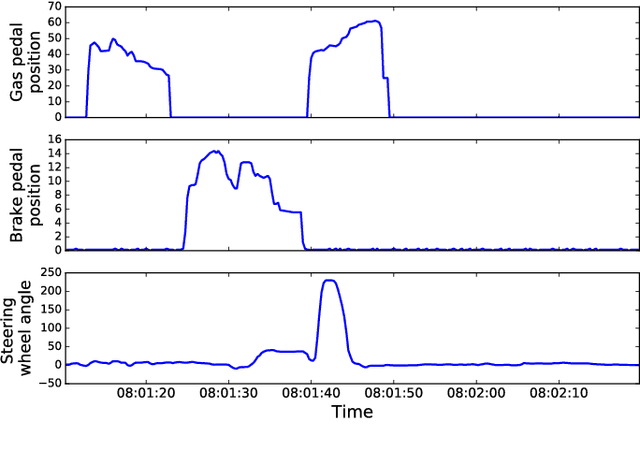
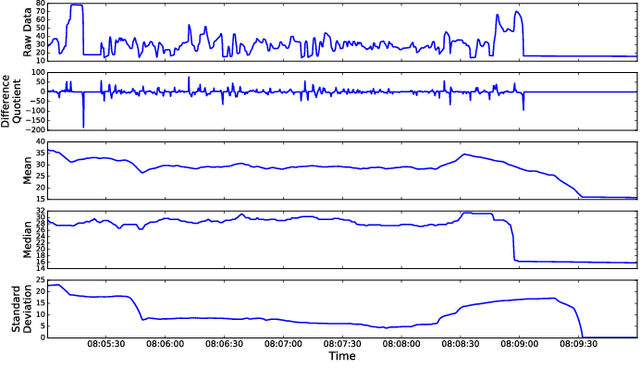
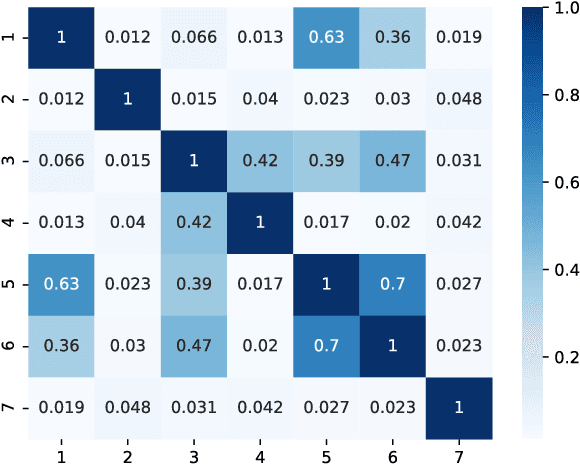
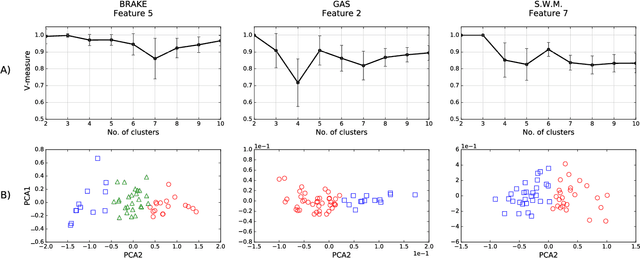
Cars can nowadays record several thousands of signals through the CAN bus technology and potentially provide real-time information on the car, the driver and the surrounding environment. This paper proposes a new method for the analysis and classification of driver behavior using a selected subset of CAN bus signals, specifically gas pedal position, brake pedal pressure, steering wheel angle, steering wheel momentum, velocity, RPM, frontal and lateral acceleration. Data has been collected in a completely uncontrolled experiment, where 64 people drove 10 cars for or a total of over 2000 driving trips without any type of pre-determined driving instruction on a wide variety of road scenarios. We propose an unsupervised learning technique that clusters drivers in different groups, and offers a validation method to test the robustness of clustering in a wide range of experimental settings. The minimal amount of data needed to preserve robust driver clustering is also computed. The presented study provides a new methodology for near-real-time classification of driver behavior in uncontrolled environments.