 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriving Behavior Analysis through CAN Bus Data in an Uncontrolled Environment
Oct 09, 2017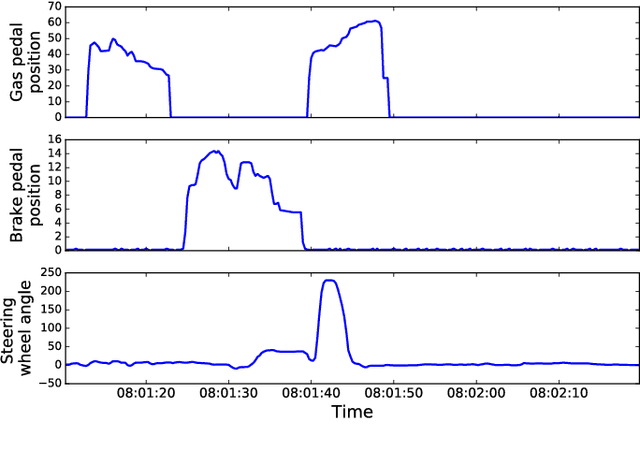
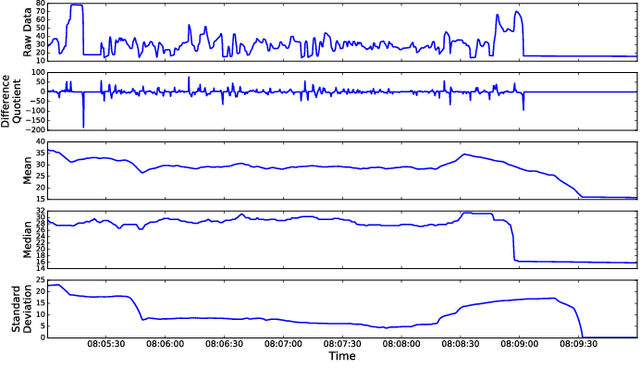
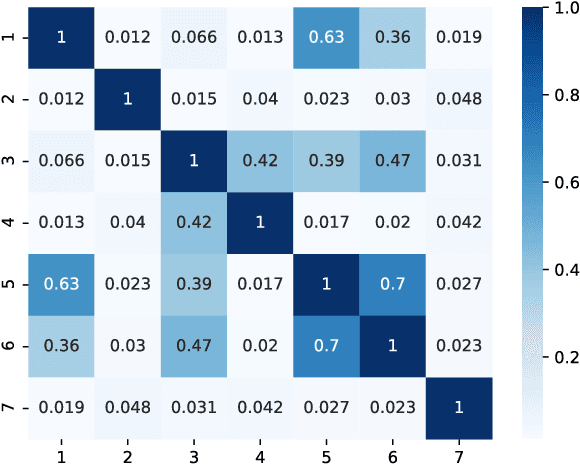
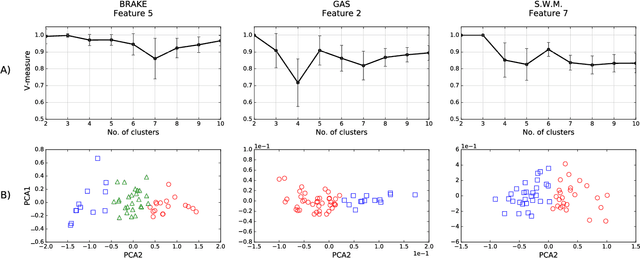
Cars can nowadays record several thousands of signals through the CAN bus technology and potentially provide real-time information on the car, the driver and the surrounding environment. This paper proposes a new method for the analysis and classification of driver behavior using a selected subset of CAN bus signals, specifically gas pedal position, brake pedal pressure, steering wheel angle, steering wheel momentum, velocity, RPM, frontal and lateral acceleration. Data has been collected in a completely uncontrolled experiment, where 64 people drove 10 cars for or a total of over 2000 driving trips without any type of pre-determined driving instruction on a wide variety of road scenarios. We propose an unsupervised learning technique that clusters drivers in different groups, and offers a validation method to test the robustness of clustering in a wide range of experimental settings. The minimal amount of data needed to preserve robust driver clustering is also computed. The presented study provides a new methodology for near-real-time classification of driver behavior in uncontrolled environments.
Driver Identification Using Automobile Sensor Data from a Single Turn
Jun 09, 2017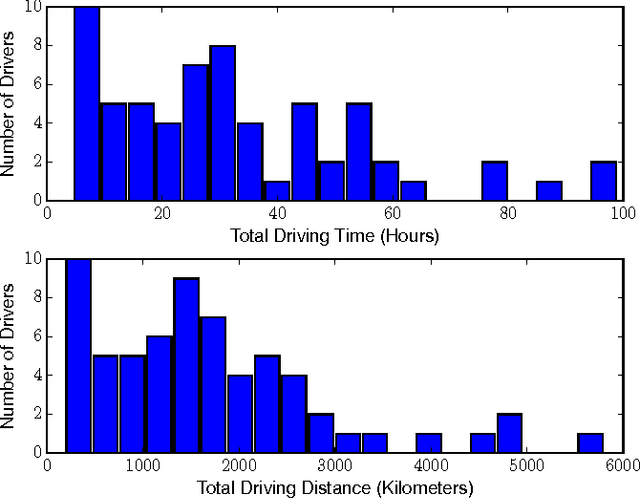

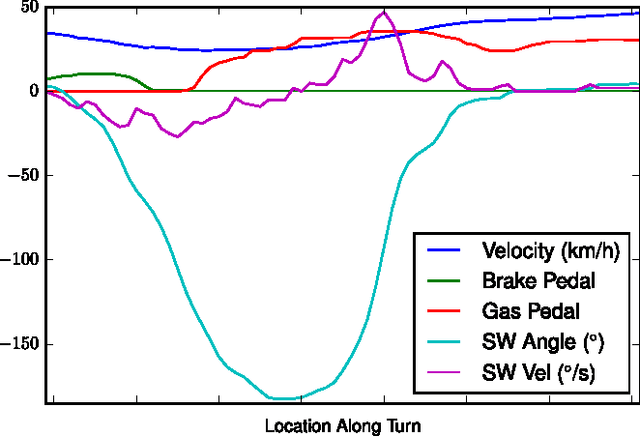

As automotive electronics continue to advance, cars are becoming more and more reliant on sensors to perform everyday driving operations. These sensors are omnipresent and help the car navigate, reduce accidents, and provide comfortable rides. However, they can also be used to learn about the drivers themselves. In this paper, we propose a method to predict, from sensor data collected at a single turn, the identity of a driver out of a given set of individuals. We cast the problem in terms of time series classification, where our dataset contains sensor readings at one turn, repeated several times by multiple drivers. We build a classifier to find unique patterns in each individual's driving style, which are visible in the data even on such a short road segment. To test our approach, we analyze a new dataset collected by AUDI AG and Audi Electronics Venture, where a fleet of test vehicles was equipped with automotive data loggers storing all sensor readings on real roads. We show that turns are particularly well-suited for detecting variations across drivers, especially when compared to straightaways. We then focus on the 12 most frequently made turns in the dataset, which include rural, urban, highway on-ramps, and more, obtaining accurate identification results and learning useful insights about driver behavior in a variety of settings.