 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrive2Vec: Multiscale State-Space Embedding of Vehicular Sensor Data
Jun 12, 2018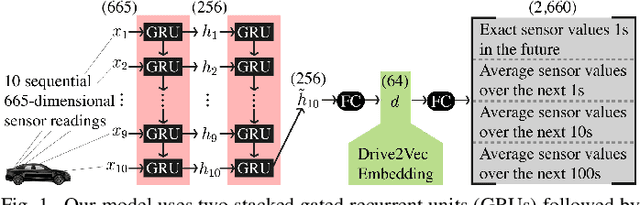
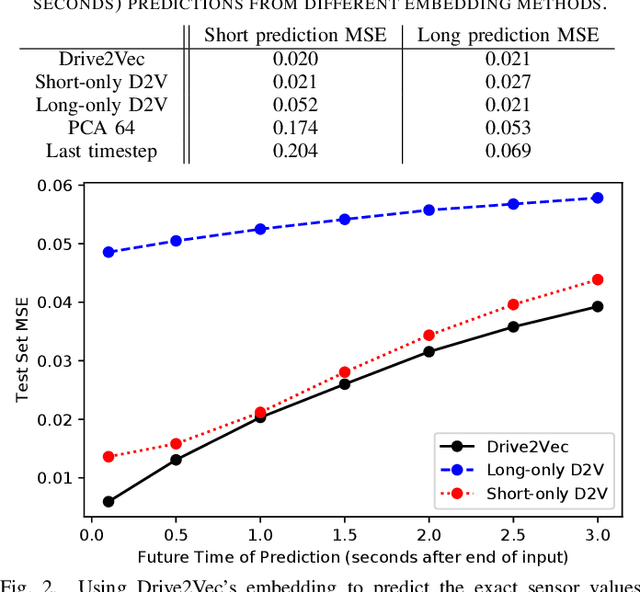
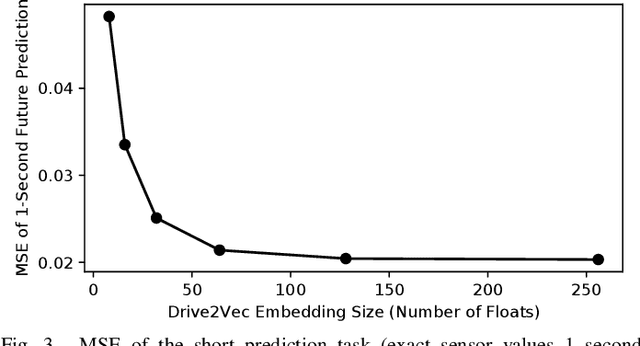
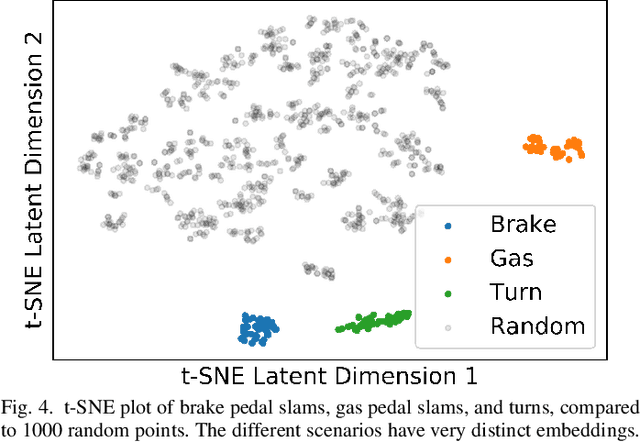
With automobiles becoming increasingly reliant on sensors to perform various driving tasks, it is important to encode the relevant CAN bus sensor data in a way that captures the general state of the vehicle in a compact form. In this paper, we develop a deep learning-based method, called Drive2Vec, for embedding such sensor data in a low-dimensional yet actionable form. Our method is based on stacked gated recurrent units (GRUs). It accepts a short interval of automobile sensor data as input and computes a low-dimensional representation of that data, which can then be used to accurately solve a range of tasks. With this representation, we (1) predict the exact values of the sensors in the short term (up to three seconds in the future), (2) forecast the long-term average values of these same sensors, (3) infer additional contextual information that is not encoded in the data, including the identity of the driver behind the wheel, and (4) build a knowledge base that can be used to auto-label data and identify risky states. We evaluate our approach on a dataset collected by Audi, which equipped a fleet of test vehicles with data loggers to store all sensor readings on 2,098 hours of driving on real roads. We show in several experiments that our method outperforms other baselines by up to 90%, and we further demonstrate how these embeddings of sensor data can be used to solve a variety of real-world automotive applications.
Driving Behavior Analysis through CAN Bus Data in an Uncontrolled Environment
Oct 09, 2017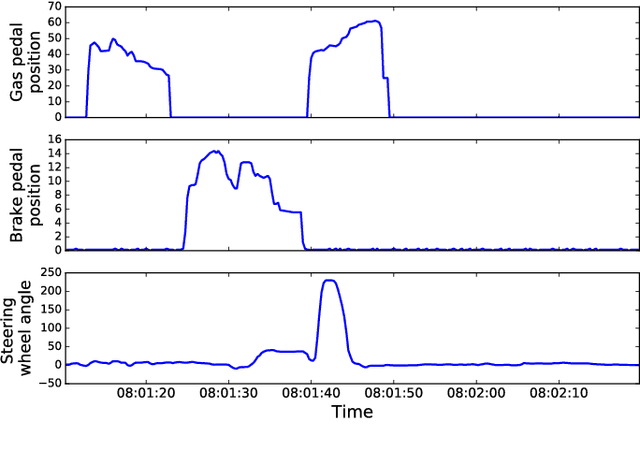
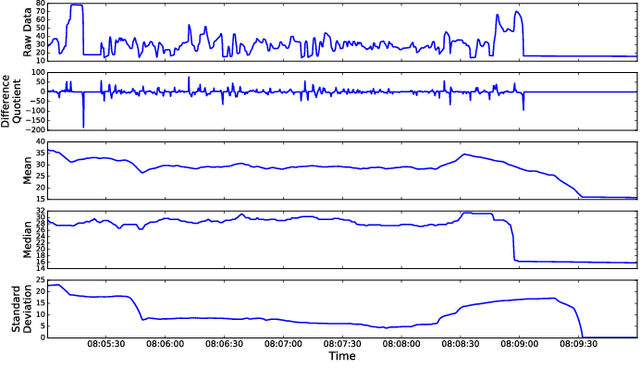
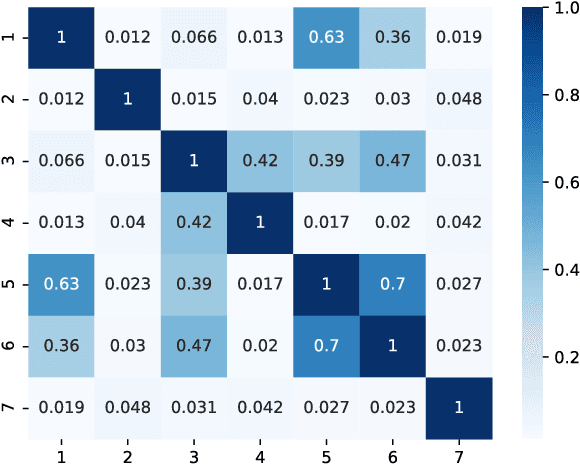
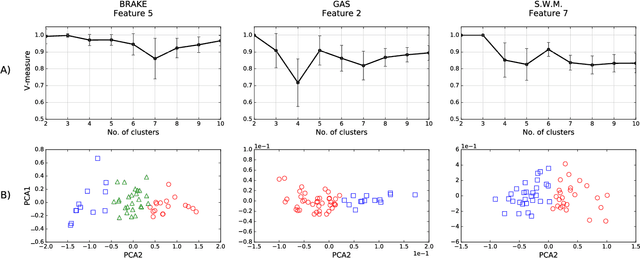
Cars can nowadays record several thousands of signals through the CAN bus technology and potentially provide real-time information on the car, the driver and the surrounding environment. This paper proposes a new method for the analysis and classification of driver behavior using a selected subset of CAN bus signals, specifically gas pedal position, brake pedal pressure, steering wheel angle, steering wheel momentum, velocity, RPM, frontal and lateral acceleration. Data has been collected in a completely uncontrolled experiment, where 64 people drove 10 cars for or a total of over 2000 driving trips without any type of pre-determined driving instruction on a wide variety of road scenarios. We propose an unsupervised learning technique that clusters drivers in different groups, and offers a validation method to test the robustness of clustering in a wide range of experimental settings. The minimal amount of data needed to preserve robust driver clustering is also computed. The presented study provides a new methodology for near-real-time classification of driver behavior in uncontrolled environments.