 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExo-Plore: Exploring Exoskeleton Control Space through Human-aligned Simulation
Jan 30, 2026Exoskeletons show great promise for enhancing mobility, but providing appropriate assistance remains challenging due to the complexity of human adaptation to external forces. Current state-of-the-art approaches for optimizing exoskeleton controllers require extensive human experiments in which participants must walk for hours, creating a paradox: those who could benefit most from exoskeleton assistance, such as individuals with mobility impairments, are rarely able to participate in such demanding procedures. We present Exo-plore, a simulation framework that combines neuromechanical simulation with deep reinforcement learning to optimize hip exoskeleton assistance without requiring real human experiments. Exo-plore can (1) generate realistic gait data that captures human adaptation to assistive forces, (2) produce reliable optimization results despite the stochastic nature of human gait, and (3) generalize to pathological gaits, showing strong linear relationships between pathology severity and optimal assistance.
Bayesian Optimization Using Domain Knowledge on the ATRIAS Biped
Sep 18, 2017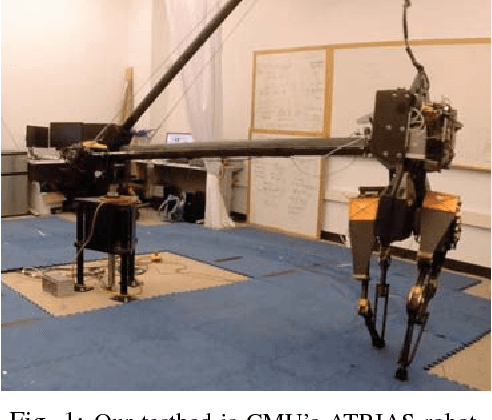
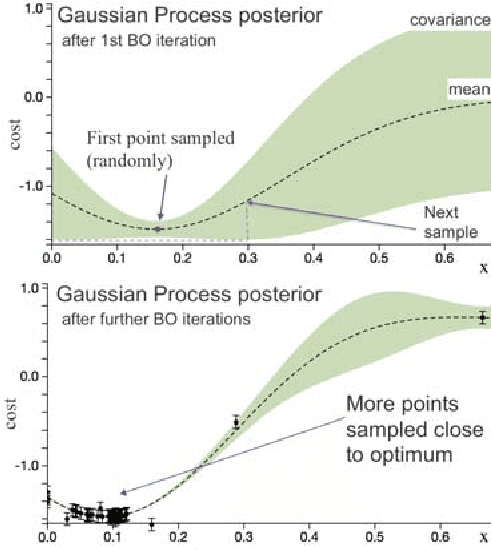
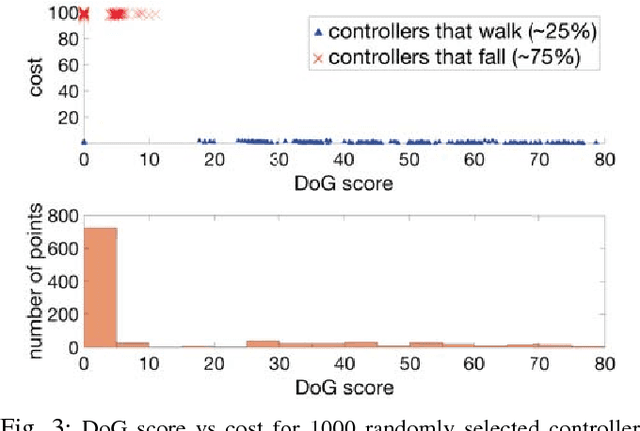
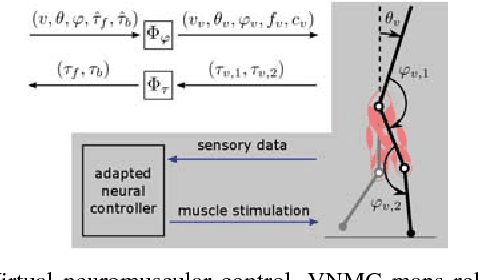
Controllers in robotics often consist of expert-designed heuristics, which can be hard to tune in higher dimensions. It is typical to use simulation to learn these parameters, but controllers learned in simulation often don't transfer to hardware. This necessitates optimization directly on hardware. However, collecting data on hardware can be expensive. This has led to a recent interest in adapting data-efficient learning techniques to robotics. One popular method is Bayesian Optimization (BO), a sample-efficient black-box optimization scheme, but its performance typically degrades in higher dimensions. We aim to overcome this problem by incorporating domain knowledge to reduce dimensionality in a meaningful way, with a focus on bipedal locomotion. In previous work, we proposed a transformation based on knowledge of human walking that projected a 16-dimensional controller to a 1-dimensional space. In simulation, this showed enhanced sample efficiency when optimizing human-inspired neuromuscular walking controllers on a humanoid model. In this paper, we present a generalized feature transform applicable to non-humanoid robot morphologies and evaluate it on the ATRIAS bipedal robot -- in simulation and on hardware. We present three different walking controllers; two are evaluated on the real robot. Our results show that this feature transform captures important aspects of walking and accelerates learning on hardware and simulation, as compared to traditional BO.