 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDISTINGUISH Workflow: A New Paradigm of Dynamic Well Placement Using Generative Machine Learning
Mar 11, 2025



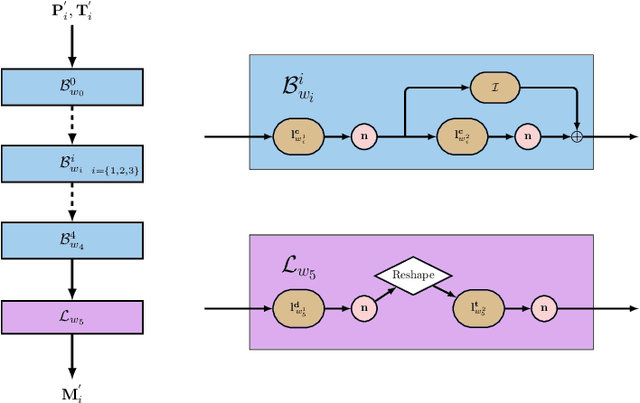
The real-time process of directional changes while drilling, known as geosteering, is crucial for hydrocarbon extraction and emerging directional drilling applications such as geothermal energy, civil infrastructure, and CO2 storage. The geo-energy industry seeks an automatic geosteering workflow that continually updates the subsurface uncertainties and captures the latest geological understanding given the most recent observations in real-time. We propose "DISTINGUISH": a real-time, AI-driven workflow designed to transform geosteering by integrating Generative Adversarial Networks (GANs) for geological parameterization, ensemble methods for model updating, and global discrete dynamic programming (DDP) optimization for complex decision-making during directional drilling operations. The DISTINGUISH framework relies on offline training of a GAN model to reproduce relevant geology realizations and a Forward Neural Network (FNN) to model Logging-While-Drilling (LWD) tools' response for a given geomodel. This paper introduces a first-of-its-kind workflow that progressively reduces GAN-geomodel uncertainty around and ahead of the drilling bit and adjusts the well plan accordingly. The workflow automatically integrates real-time LWD data with a DDP-based decision support system, enhancing predictive models of geology ahead of drilling and leading to better steering decisions. We present a simple yet representative benchmark case and document the performance target achieved by the DISTINGUISH workflow prototype. This benchmark will be a foundation for future methodological advancements and workflow refinements.
High-Precision Geosteering via Reinforcement Learning and Particle Filters
Feb 09, 2024



Geosteering, a key component of drilling operations, traditionally involves manual interpretation of various data sources such as well-log data. This introduces subjective biases and inconsistent procedures. Academic attempts to solve geosteering decision optimization with greedy optimization and Approximate Dynamic Programming (ADP) showed promise but lacked adaptivity to realistic diverse scenarios. Reinforcement learning (RL) offers a solution to these challenges, facilitating optimal decision-making through reward-based iterative learning. State estimation methods, e.g., particle filter (PF), provide a complementary strategy for geosteering decision-making based on online information. We integrate an RL-based geosteering with PF to address realistic geosteering scenarios. Our framework deploys PF to process real-time well-log data to estimate the location of the well relative to the stratigraphic layers, which then informs the RL-based decision-making process. We compare our method's performance with that of using solely either RL or PF. Our findings indicate a synergy between RL and PF in yielding optimized geosteering decisions.
Optimal Sequential Decision-Making in Geosteering: A Reinforcement Learning Approach
Oct 07, 2023Trajectory adjustment decisions throughout the drilling process, called geosteering, affect subsequent choices and information gathering, thus resulting in a coupled sequential decision problem. Previous works on applying decision optimization methods in geosteering rely on greedy optimization or Approximate Dynamic Programming (ADP). Either decision optimization method requires explicit uncertainty and objective function models, making developing decision optimization methods for complex and realistic geosteering environments challenging to impossible. We use the Deep Q-Network (DQN) method, a model-free reinforcement learning (RL) method that learns directly from the decision environment, to optimize geosteering decisions. The expensive computations for RL are handled during the offline training stage. Evaluating DQN needed for real-time decision support takes milliseconds and is faster than the traditional alternatives. Moreover, for two previously published synthetic geosteering scenarios, our results show that RL achieves high-quality outcomes comparable to the quasi-optimal ADP. Yet, the model-free nature of RL means that by replacing the training environment, we can extend it to problems where the solution to ADP is prohibitively expensive to compute. This flexibility will allow applying it to more complex environments and make hybrid versions trained with real data in the future.
Strategic Geosteeering Workflow with Uncertainty Quantification and Deep Learning: A Case Study on the Goliat Field
Oct 27, 2022



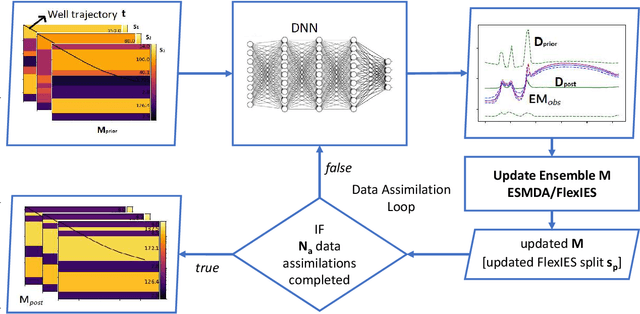
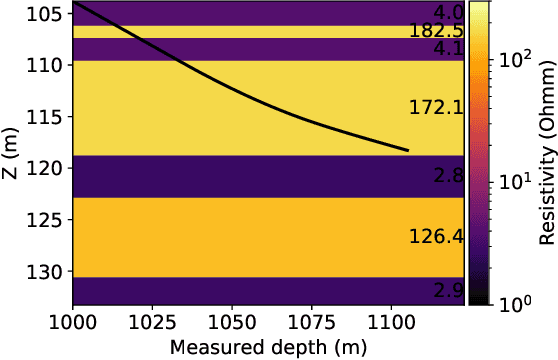
The real-time interpretation of the logging-while-drilling data allows us to estimate the positions and properties of the geological layers in an anisotropic subsurface environment. Robust real-time estimations capturing uncertainty can be very useful for efficient geosteering operations. However, the model errors in the prior conceptual geological models and forward simulation of the measurements can be significant factors in the unreliable estimations of the profiles of the geological layers. The model errors are specifically pronounced when using a deep-neural-network (DNN) approximation which we use to accelerate and parallelize the simulation of the measurements. This paper presents a practical workflow consisting of offline and online phases. The offline phase includes DNN training and building of an uncertain prior near-well geo-model. The online phase uses the flexible iterative ensemble smoother (FlexIES) to perform real-time assimilation of extra-deep electromagnetic data accounting for the model errors in the approximate DNN model. We demonstrate the proposed workflow on a case study for a historic well in the Goliat Field (Barents Sea). The median of our probabilistic estimation is on-par with proprietary inversion despite the approximate DNN model and regardless of the number of layers in the chosen prior. By estimating the model errors, FlexIES automatically quantifies the uncertainty in the layers' boundaries and resistivities, which is not standard for proprietary inversion.
Probabilistic forecasting for geosteering in fluvial successions using a generative adversarial network
Jul 04, 2022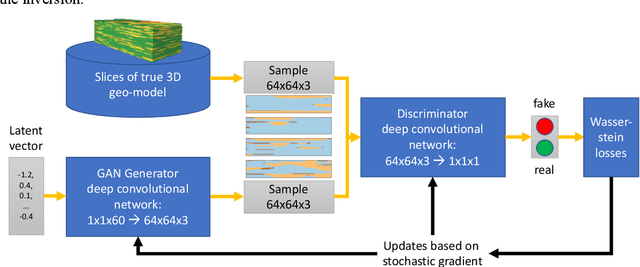
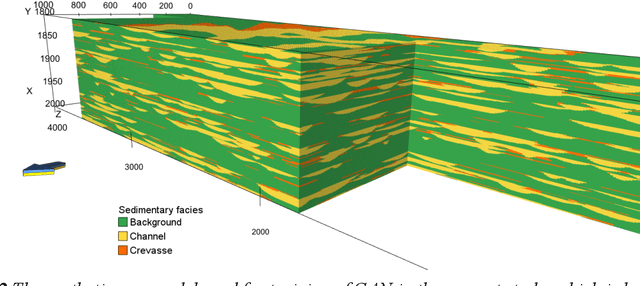
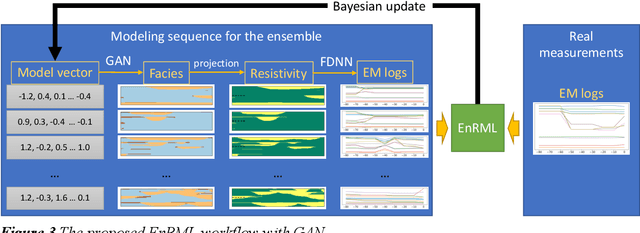
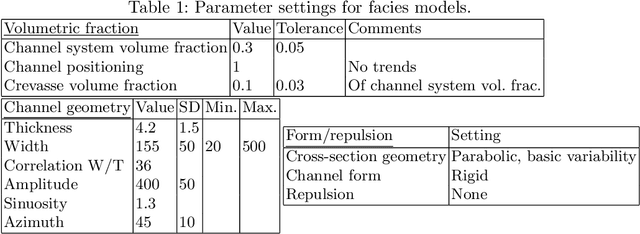
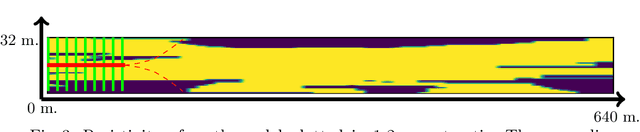
Quantitative workflows utilizing real-time data to constrain ahead-of-bit uncertainty have the potential to improve geosteering significantly. Fast updates based on real-time data are essential when drilling in complex reservoirs with high uncertainties in pre-drill models. However, practical assimilation of real-time data requires effective geological modeling and mathematically robust parameterization. We propose a generative adversarial deep neural network (GAN), trained to reproduce geologically consistent 2D sections of fluvial successions. Offline training produces a fast GAN-based approximation of complex geology parameterized as a 60-dimensional model vector with standard Gaussian distribution of each component. Probabilistic forecasts are generated using an ensemble of equiprobable model vector realizations. A forward-modeling sequence, including a GAN, converts the initial (prior) ensemble of realizations into EM log predictions. An ensemble smoother minimizes statistical misfits between predictions and real-time data, yielding an update of model vectors and reduced uncertainty around the well. Updates can be then translated to probabilistic predictions of facies and resistivities. The present paper demonstrates a workflow for geosteering in an outcrop-based, synthetic fluvial succession. In our example, the method reduces uncertainty and correctly predicts most major geological features up to 500 meters ahead of drill-bit.
Probabilistic model-error assessment of deep learning proxies: an application to real-time inversion of borehole electromagnetic measurements
May 25, 2022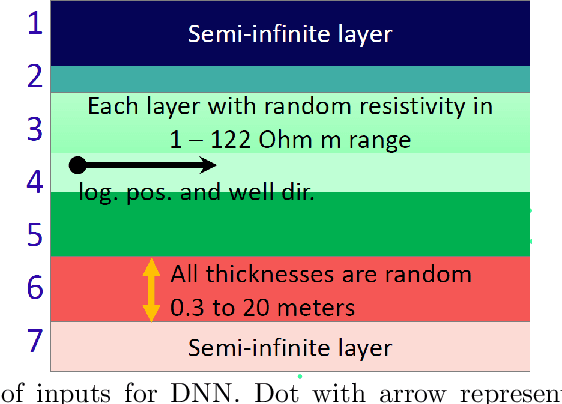

The advent of fast sensing technologies allows for real-time model updates in many applications where the model parameters are uncertain. Bayesian algorithms, such as ensemble smoothers, offer a real-time probabilistic inversion accounting for uncertainties. However, they rely on the repeated evaluation of the computational models, and deep neural network (DNN) based proxies can be useful to address this computational bottleneck. This paper studies the effects of the approximate nature of the deep learned models and associated model errors during the inversion of extra-deep borehole electromagnetic (EM) measurements, which are critical for geosteering. Using a deep neural network (DNN) as a forward model allows us to perform thousands of model evaluations within seconds, which is very useful for quantifying uncertainties and non-uniqueness in real-time. While significant efforts are usually made to ensure the accuracy of the DNN models, it is known that they contain unknown model errors in the regions not covered by the training data. When DNNs are utilized during inversion of EM measurements, the effects of the model errors could manifest themselves as a bias in the estimated input parameters and, consequently, might result in a low-quality geosteering decision. We present numerical results highlighting the challenges associated with the inversion of EM measurements while neglecting model error. We further demonstrate the utility of a recently proposed flexible iterative ensemble smoother in reducing the effect of model bias by capturing the unknown model errors, thus improving the quality of the estimated subsurface properties for geosteering operation. Moreover, we describe a procedure for identifying inversion multimodality and propose possible solutions to alleviate it in real-time.
Deep learning for prediction of complex geology ahead of drilling
Apr 06, 2021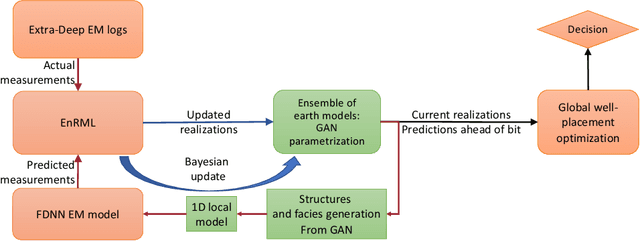

During a geosteering operation the well path is intentionally adjusted in response to the new data acquired while drilling. To achieve consistent high-quality decisions, especially when drilling in complex environments, decision support systems can help cope with high volumes of data and interpretation complexities. They can assimilate the real-time measurements into a probabilistic earth model and use the updated model for decision recommendations. Recently, machine learning (ML) techniques have enabled a wide range of methods that redistribute computational cost from on-line to off-line calculations. In this paper, we introduce two ML techniques into the geosteering decision support framework. Firstly, a complex earth model representation is generated using a Generative Adversarial Network (GAN). Secondly, a commercial extra-deep electromagnetic simulator is represented using a Forward Deep Neural Network (FDNN). The numerical experiments demonstrate that the combination of the GAN and the FDNN in an ensemble randomized maximum likelihood data assimilation scheme provides real-time estimates of complex geological uncertainty. This yields reduction of geological uncertainty ahead of the drill-bit from the measurements gathered behind and around the well bore.
Modeling extra-deep EM logs using a deep neural network
Jun 05, 2020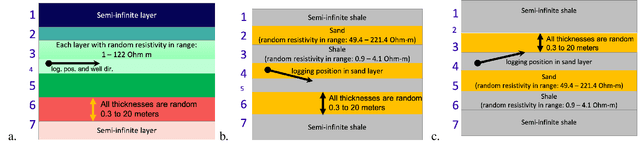
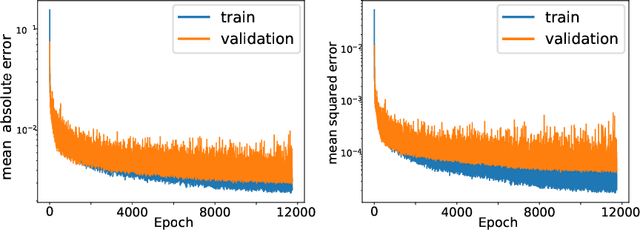
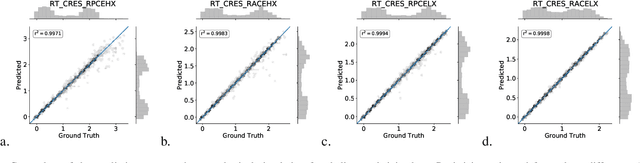
Modern geosteering is heavily dependent on real-time interpretation of deep electromagnetic (EM) measurements. This work presents a deep neural network (DNN) model trained to reproduce the full set of extra-deep real-time EM logs consisting of 22 measurements per logging position. The model is trained in a 1D layered environment and has sensitivity for up to seven layers with different resistivity values. A commercial simulator provided by a tool vendor is utilized to generate a training dataset. The impossibility of parallel execution of the simulator effectively limits the permissible dataset size. Therefore, the geological rules and geosteering specifics supported by the forward model are embraced when designing the dataset. It is then used to produce a fully parallel EM simulator based on a DNN without access to the proprietary information about the EM tool configuration or the original simulator source code. Despite a relatively small training set size, the resulting DNN forward model is quite accurate for synthetic geosteering cases, yet independent of the logging instrument vendor. The observed average evaluation time of 0.15 milliseconds per logging position makes it also suitable for future use as part of evaluation-hungry statistical and/or Monte-Carlo inversion algorithms.