 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling extra-deep EM logs using a deep neural network
Paper and Code
Jun 05, 2020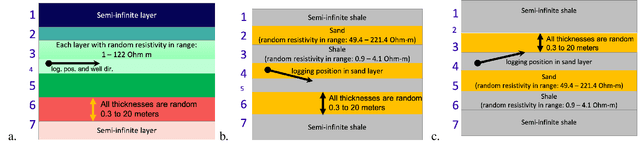
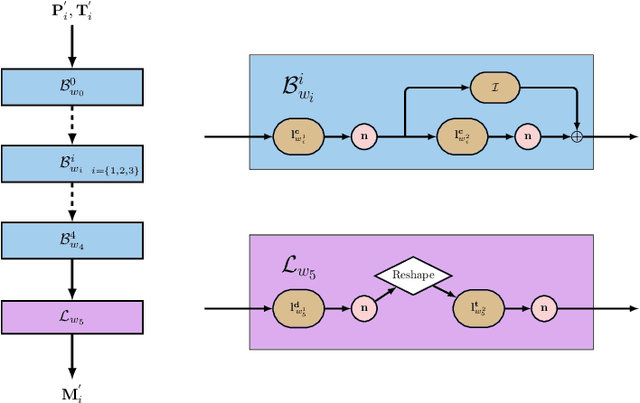
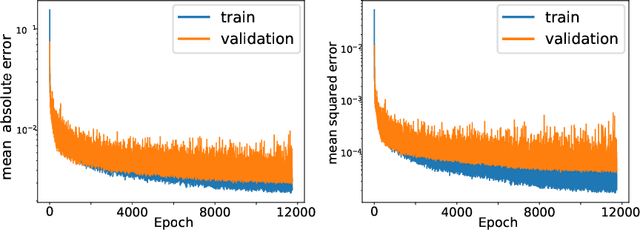
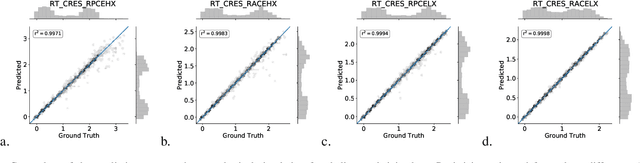
Modern geosteering is heavily dependent on real-time interpretation of deep electromagnetic (EM) measurements. This work presents a deep neural network (DNN) model trained to reproduce the full set of extra-deep real-time EM logs consisting of 22 measurements per logging position. The model is trained in a 1D layered environment and has sensitivity for up to seven layers with different resistivity values. A commercial simulator provided by a tool vendor is utilized to generate a training dataset. The impossibility of parallel execution of the simulator effectively limits the permissible dataset size. Therefore, the geological rules and geosteering specifics supported by the forward model are embraced when designing the dataset. It is then used to produce a fully parallel EM simulator based on a DNN without access to the proprietary information about the EM tool configuration or the original simulator source code. Despite a relatively small training set size, the resulting DNN forward model is quite accurate for synthetic geosteering cases, yet independent of the logging instrument vendor. The observed average evaluation time of 0.15 milliseconds per logging position makes it also suitable for future use as part of evaluation-hungry statistical and/or Monte-Carlo inversion algorithms.