 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn MILP Approach for Real-time Optimal Controller Synthesis with Metric Temporal Logic Specifications
Mar 08, 2016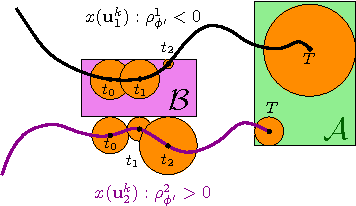
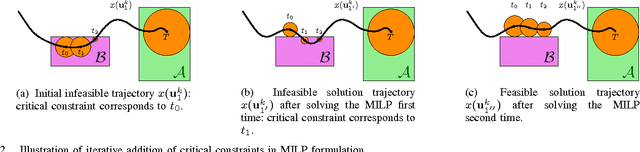
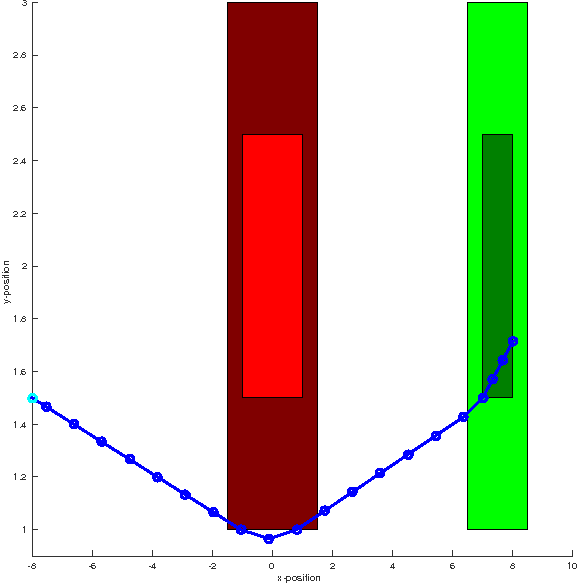
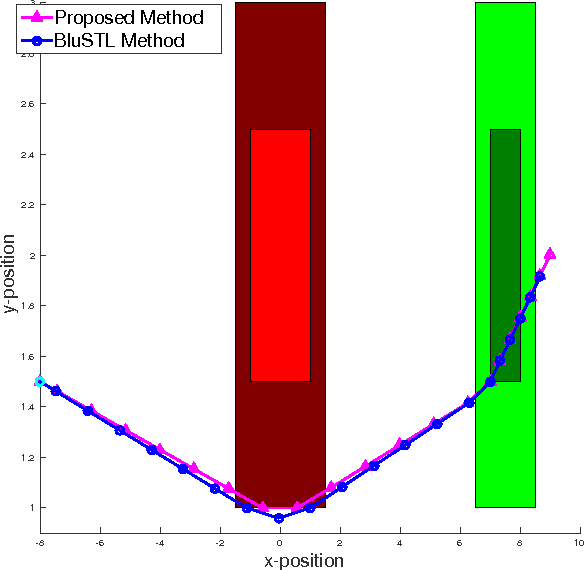
The fundamental idea of this work is to synthesize reactive controllers such that closed-loop execution trajectories of the system satisfy desired specifications that ensure correct system behaviors, while optimizing a desired performance criteria. In our approach, the correctness of a system's behavior can be defined according to the system's relation to the environment, for example, the output trajectories of the system terminate in a goal set without entering an unsafe set. Using Metric Temporal Logic (MTL) specifications we can further capture complex system behaviors and timing requirements, such as the output trajectories must pass through a number of way-points within a certain time frame before terminating in the goal set. Given a Mixed Logical Dynamical (MLD) system and system specifications in terms of MTL formula or simpler reach-avoid specifications, our goal is to find a closed-loop trajectory that satisfies the specifications, in non-deterministic environments. Using an MILP framework we search over the space of input signals to obtain such valid trajectories of the system, by adding constraints to satisfy the MTL formula only when necessary, to avoid the exponential complexity of solving MILP problems. We also present experimental results for planning a path for a mobile robot through a dynamically changing environment with a desired task specification.
Comparative Studies on Decentralized Multiloop PID Controller Design Using Evolutionary Algorithms
Jan 05, 2013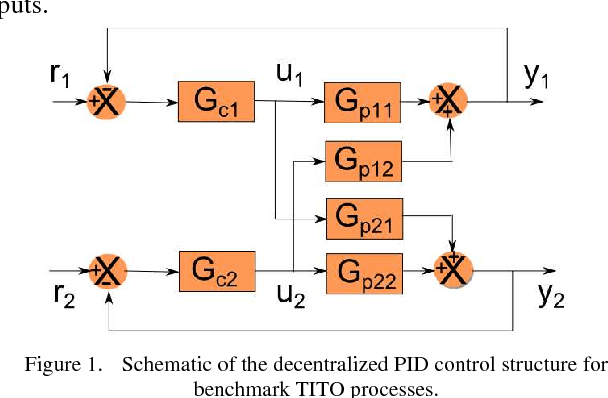
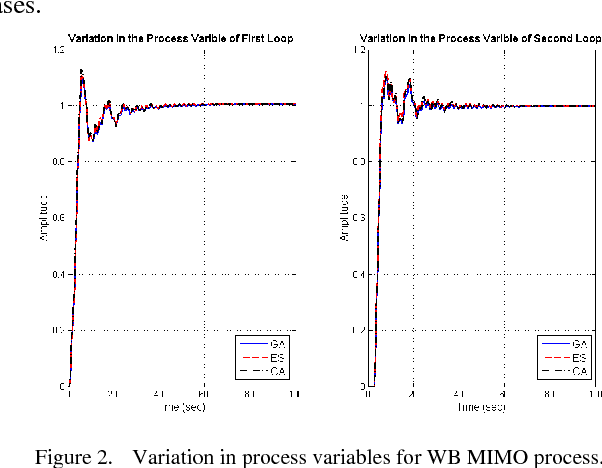
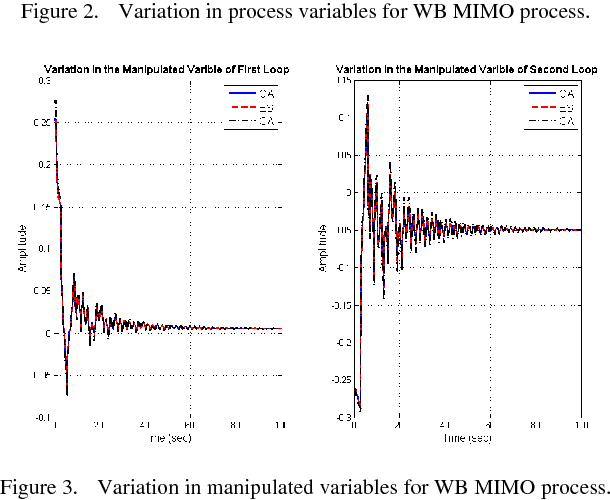
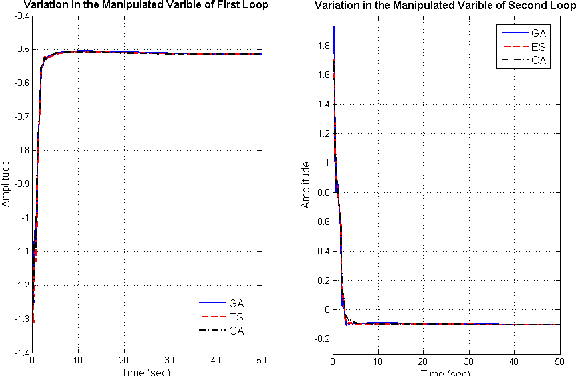
Decentralized PID controllers have been designed in this paper for simultaneous tracking of individual process variables in multivariable systems under step reference input. The controller design framework takes into account the minimization of a weighted sum of Integral of Time multiplied Squared Error (ITSE) and Integral of Squared Controller Output (ISCO) so as to balance the overall tracking errors for the process variables and required variation in the corresponding manipulated variables. Decentralized PID gains are tuned using three popular Evolutionary Algorithms (EAs) viz. Genetic Algorithm (GA), Evolutionary Strategy (ES) and Cultural Algorithm (CA). Credible simulation comparisons have been reported for four benchmark 2x2 multivariable processes.
* 6 pages, 9 figures
Identification of Nonlinear Systems From the Knowledge Around Different Operating Conditions: A Feed-Forward Multi-Layer ANN Based Approach
Dec 18, 2012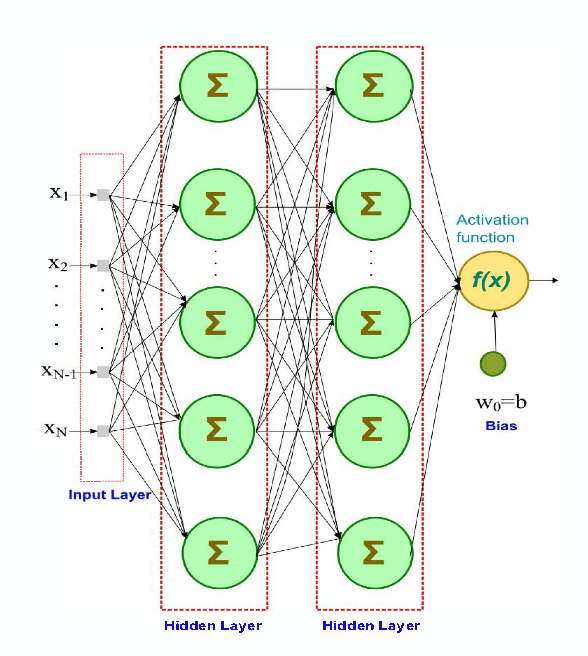
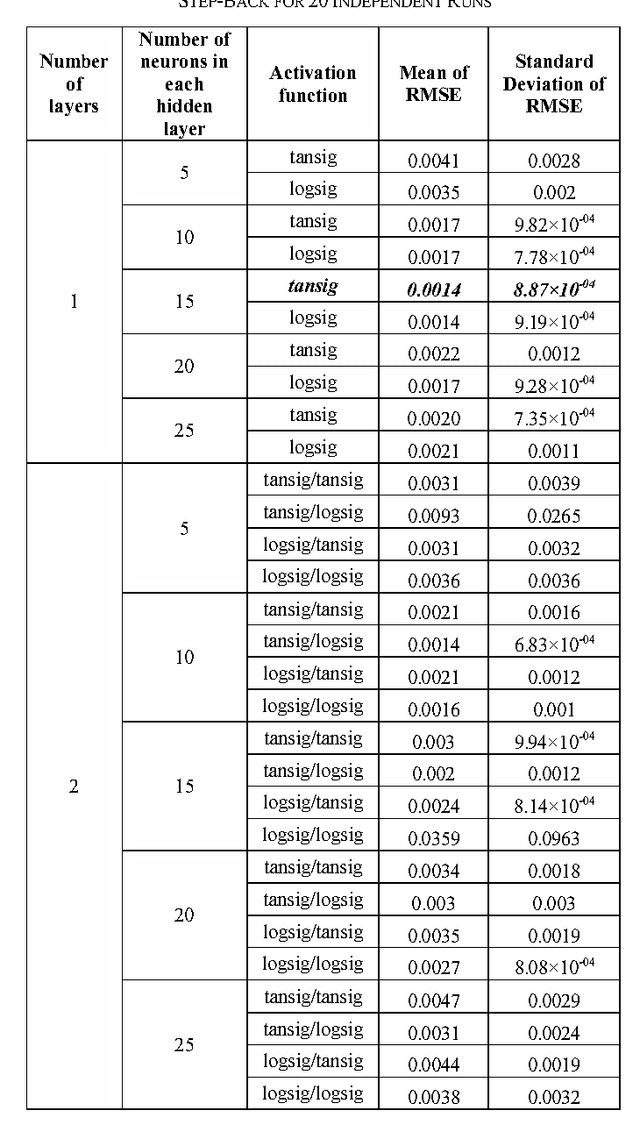
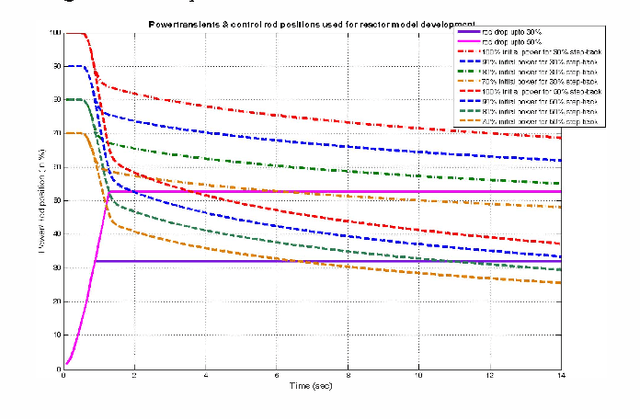
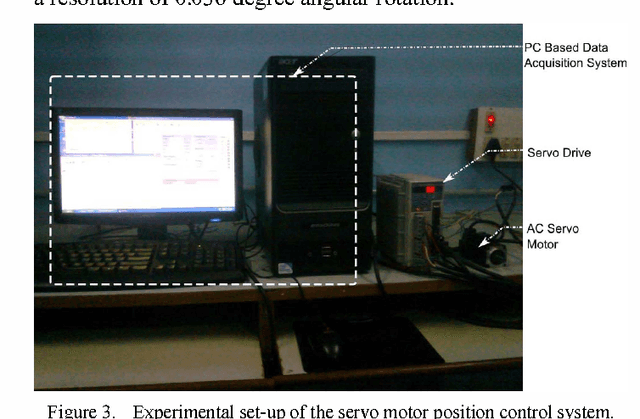
The paper investigates nonlinear system identification using system output data at various linearized operating points. A feed-forward multi-layer Artificial Neural Network (ANN) based approach is used for this purpose and tested for two target applications i.e. nuclear reactor power level monitoring and an AC servo position control system. Various configurations of ANN using different activation functions, number of hidden layers and neurons in each layer are trained and tested to find out the best configuration. The training is carried out multiple times to check for consistency and the mean and standard deviation of the root mean square errors (RMSE) are reported for each configuration.