 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Object Detection with Pseudo Labels from VLMs using Per-Object Co-teaching
Nov 13, 2025



Foundation models, especially vision-language models (VLMs), offer compelling zero-shot object detection for applications like autonomous driving, a domain where manual labelling is prohibitively expensive. However, their detection latency and tendency to hallucinate predictions render them unsuitable for direct deployment. This work introduces a novel pipeline that addresses this challenge by leveraging VLMs to automatically generate pseudo-labels for training efficient, real-time object detectors. Our key innovation is a per-object co-teaching-based training strategy that mitigates the inherent noise in VLM-generated labels. The proposed per-object coteaching approach filters noisy bounding boxes from training instead of filtering the entire image. Specifically, two YOLO models learn collaboratively, filtering out unreliable boxes from each mini-batch based on their peers' per-object loss values. Overall, our pipeline provides an efficient, robust, and scalable approach to train high-performance object detectors for autonomous driving, significantly reducing reliance on costly human annotation. Experimental results on the KITTI dataset demonstrate that our method outperforms a baseline YOLOv5m model, achieving a significant mAP@0.5 boost ($31.12\%$ to $46.61\%$) while maintaining real-time detection latency. Furthermore, we show that supplementing our pseudo-labelled data with a small fraction of ground truth labels ($10\%$) leads to further performance gains, reaching $57.97\%$ mAP@0.5 on the KITTI dataset. We observe similar performance improvements for the ACDC and BDD100k datasets.
One-shot domain adaptation for semantic face editing of real world images using StyleALAE
Aug 31, 2021
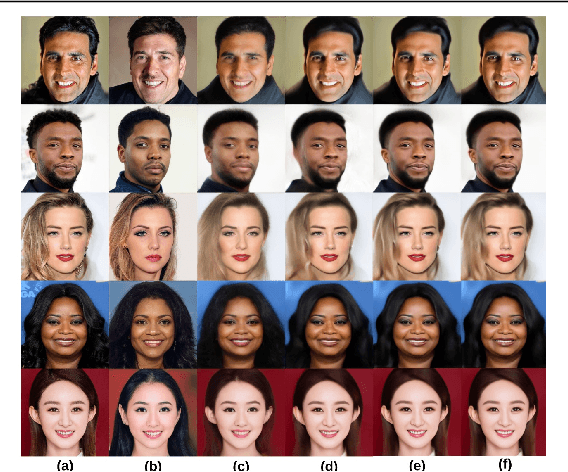
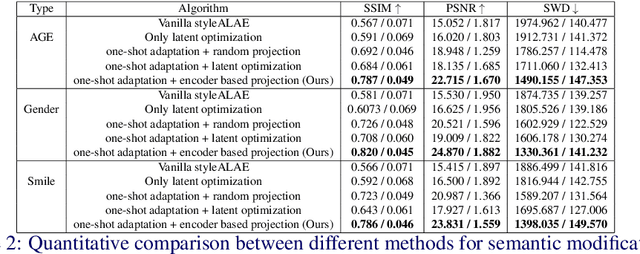
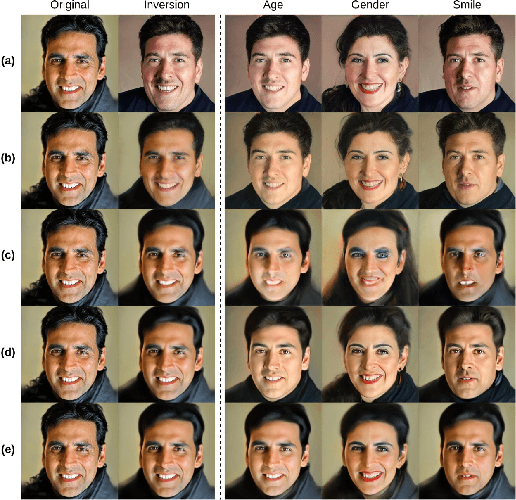
Semantic face editing of real world facial images is an important application of generative models. Recently, multiple works have explored possible techniques to generate such modifications using the latent structure of pre-trained GAN models. However, such approaches often require training an encoder network and that is typically a time-consuming and resource intensive process. A possible alternative to such a GAN-based architecture can be styleALAE, a latent-space based autoencoder that can generate photo-realistic images of high quality. Unfortunately, the reconstructed image in styleALAE does not preserve the identity of the input facial image. This limits the application of styleALAE for semantic face editing of images with known identities. In our work, we use a recent advancement in one-shot domain adaptation to address this problem. Our work ensures that the identity of the reconstructed image is the same as the given input image. We further generate semantic modifications over the reconstructed image by using the latent space of the pre-trained styleALAE model. Results show that our approach can generate semantic modifications on any real world facial image while preserving the identity.
Bio-inspired Rhythmic Locomotion in a Six-Legged Robot
Jul 27, 2021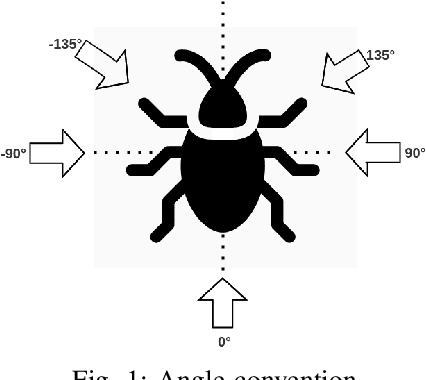
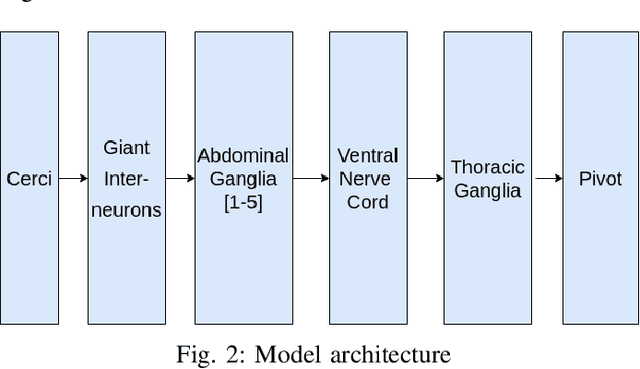
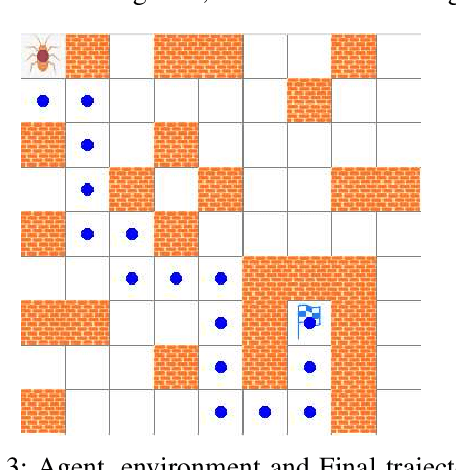

Developing a framework for the locomotion of a six-legged robot or a hexapod is a complex task that has extensive hardware and computational requirements. In this paper, we present a bio-inspired framework for the locomotion of a hexapod. Our locomotion model draws inspiration from the structure of a cockroach, with its fairly simple central nervous system, and results in our model being computationally inexpensive with simpler control mechanisms. We consider the limb morphology for a hexapod, the corresponding central pattern generators for its limbs, and the inter-limb coordination required to generate appropriate patterns in its limbs. We also designed two experiments to validate our locomotion model. Our first experiment models the predator-prey dynamics between a cockroach and its predator. Our second experiment makes use of a reinforcement learning-based algorithm, putting forward a realization of our locomotion model. These experiments suggest that this model will help realize practical hexapod robot designs.