 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBio-inspired Rhythmic Locomotion in a Six-Legged Robot
Paper and Code
Jul 27, 2021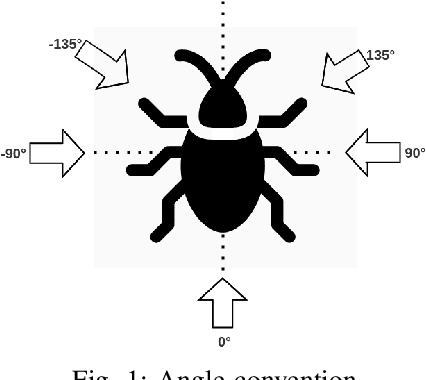
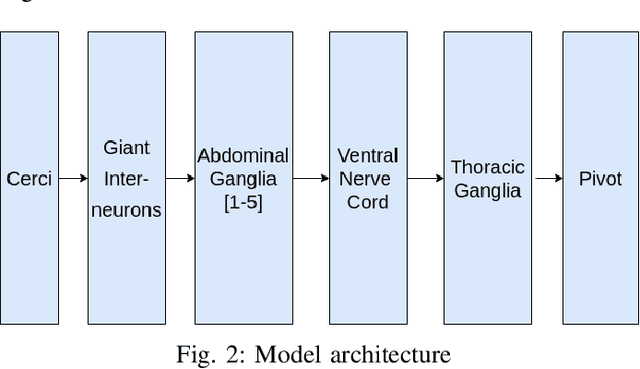
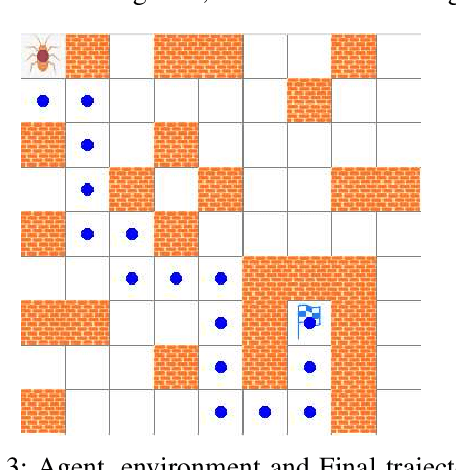

Developing a framework for the locomotion of a six-legged robot or a hexapod is a complex task that has extensive hardware and computational requirements. In this paper, we present a bio-inspired framework for the locomotion of a hexapod. Our locomotion model draws inspiration from the structure of a cockroach, with its fairly simple central nervous system, and results in our model being computationally inexpensive with simpler control mechanisms. We consider the limb morphology for a hexapod, the corresponding central pattern generators for its limbs, and the inter-limb coordination required to generate appropriate patterns in its limbs. We also designed two experiments to validate our locomotion model. Our first experiment models the predator-prey dynamics between a cockroach and its predator. Our second experiment makes use of a reinforcement learning-based algorithm, putting forward a realization of our locomotion model. These experiments suggest that this model will help realize practical hexapod robot designs.