 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetwork Synthetic Interventions: A Framework for Panel Data with Network Interference
Oct 20, 2022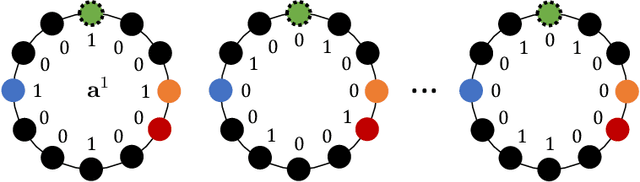

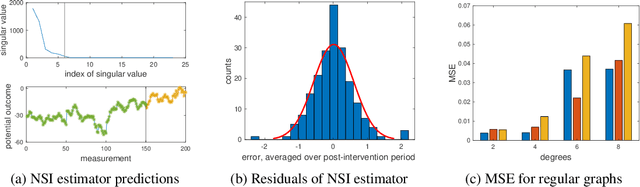
We propose a generalization of the synthetic controls and synthetic interventions methodology to incorporate network interference. We consider the estimation of unit-specific treatment effects from panel data where there are spillover effects across units and in the presence of unobserved confounding. Key to our approach is a novel latent factor model that takes into account network interference and generalizes the factor models typically used in panel data settings. We propose an estimator, "network synthetic interventions", and show that it consistently estimates the mean outcomes for a unit under an arbitrary sequence of treatments for itself and its neighborhood, given certain observation patterns hold in the data. We corroborate our theoretical findings with simulations.
Probably Unknown: Deep Inverse Sensor Modelling In Radar
Oct 18, 2018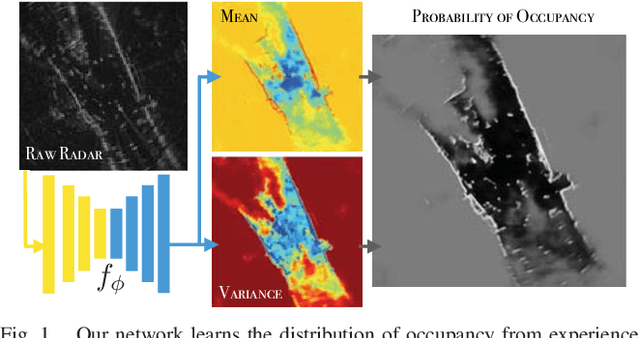
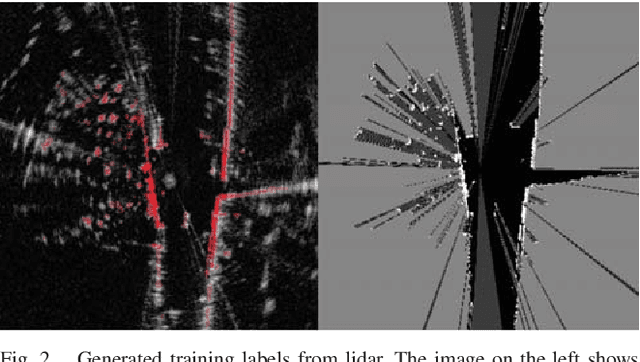
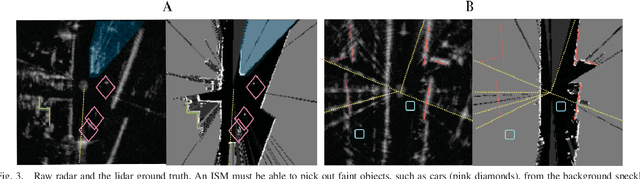
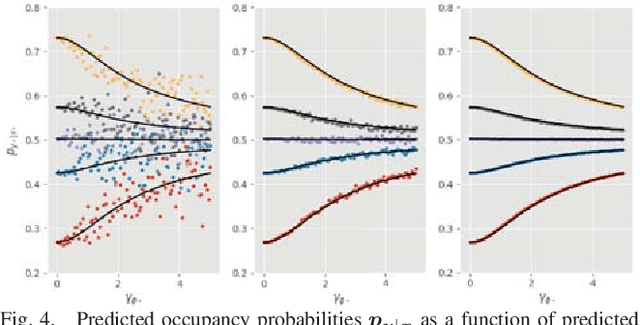
Radar presents a promising alternative to lidar and vision in autonomous vehicle applications, being able to detect objects at long range under a variety of weather conditions. However, distinguishing between occupied and free space from a raw radar scan is notoriously difficult. We consider the challenge of learning an Inverse Sensor Model (ISM) mapping a raw radar observation to occupancy probabilities in a discretised space. We frame this problem as a segmentation task, utilising a deep neural network that is able to learn an inherently probabilistic ISM from raw sensor data considers scene context. In doing so our approach explicitly accounts for the heteroscedastic aleatoric uncertainty for radar that arises due to complex interactions between occlusion and sensor noise. Our network is trained using only partial occupancy labels generated from lidar and able to successfully distinguish between occupied and free space. We evaluate our approach on five hours of data recorded in a dynamic urban environment and show that it significantly outperforms classical constant false-alarm rate (CFAR) filtering approaches in light of challenging noise artefacts whilst identifying space that is inherently uncertain because of occlusion.