 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConcept for an Automatic Annotation of Automotive Radar Data Using AI-segmented Aerial Camera Images
Sep 01, 2023



This paper presents an approach to automatically annotate automotive radar data with AI-segmented aerial camera images. For this, the images of an unmanned aerial vehicle (UAV) above a radar vehicle are panoptically segmented and mapped in the ground plane onto the radar images. The detected instances and segments in the camera image can then be applied directly as labels for the radar data. Owing to the advantageous bird's eye position, the UAV camera does not suffer from optical occlusion and is capable of creating annotations within the complete field of view of the radar. The effectiveness and scalability are demonstrated in measurements, where 589 pedestrians in the radar data were automatically labeled within 2 minutes.
Unsupervised Part Discovery by Unsupervised Disentanglement
Sep 10, 2020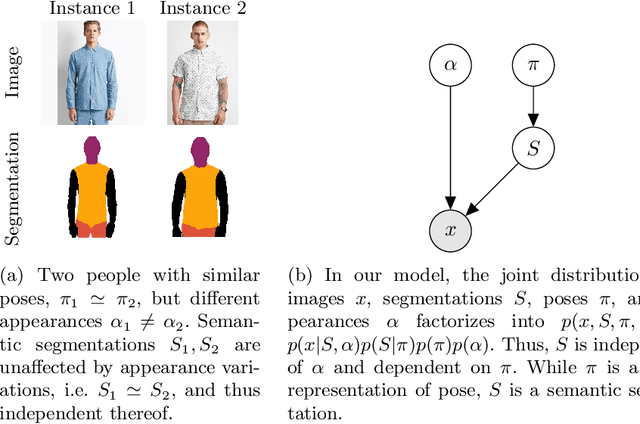
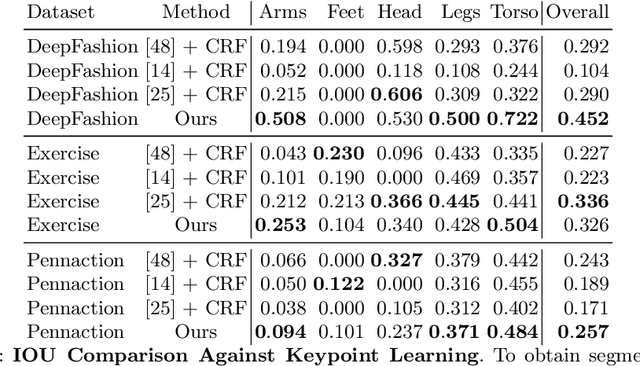
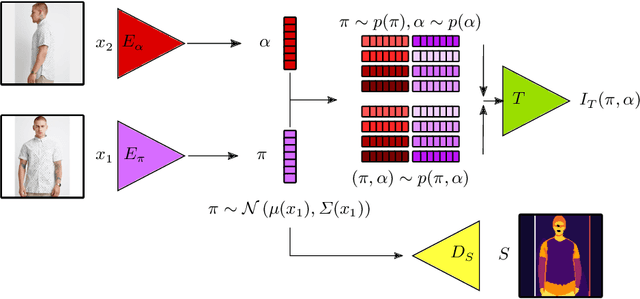
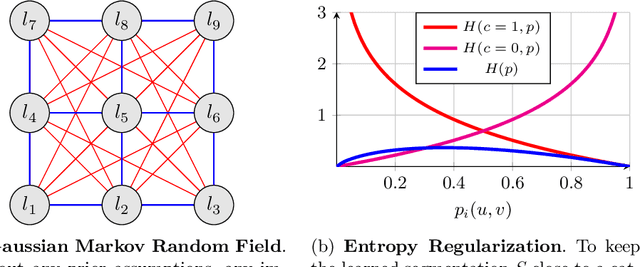
We address the problem of discovering part segmentations of articulated objects without supervision. In contrast to keypoints, part segmentations provide information about part localizations on the level of individual pixels. Capturing both locations and semantics, they are an attractive target for supervised learning approaches. However, large annotation costs limit the scalability of supervised algorithms to other object categories than humans. Unsupervised approaches potentially allow to use much more data at a lower cost. Most existing unsupervised approaches focus on learning abstract representations to be refined with supervision into the final representation. Our approach leverages a generative model consisting of two disentangled representations for an object's shape and appearance and a latent variable for the part segmentation. From a single image, the trained model infers a semantic part segmentation map. In experiments, we compare our approach to previous state-of-the-art approaches and observe significant gains in segmentation accuracy and shape consistency. Our work demonstrates the feasibility to discover semantic part segmentations without supervision.