 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Explainable Motion Prediction using Heterogeneous Graph Representations
Dec 07, 2022Motion prediction systems aim to capture the future behavior of traffic scenarios enabling autonomous vehicles to perform safe and efficient planning. The evolution of these scenarios is highly uncertain and depends on the interactions of agents with static and dynamic objects in the scene. GNN-based approaches have recently gained attention as they are well suited to naturally model these interactions. However, one of the main challenges that remains unexplored is how to address the complexity and opacity of these models in order to deal with the transparency requirements for autonomous driving systems, which includes aspects such as interpretability and explainability. In this work, we aim to improve the explainability of motion prediction systems by using different approaches. First, we propose a new Explainable Heterogeneous Graph-based Policy (XHGP) model based on an heterograph representation of the traffic scene and lane-graph traversals, which learns interaction behaviors using object-level and type-level attention. This learned attention provides information about the most important agents and interactions in the scene. Second, we explore this same idea with the explanations provided by GNNExplainer. Third, we apply counterfactual reasoning to provide explanations of selected individual scenarios by exploring the sensitivity of the trained model to changes made to the input data, i.e., masking some elements of the scene, modifying trajectories, and adding or removing dynamic agents. The explainability analysis provided in this paper is a first step towards more transparent and reliable motion prediction systems, important from the perspective of the user, developers and regulatory agencies. The code to reproduce this work is publicly available at https://github.com/sancarlim/Explainable-MP/tree/v1.1.
Towards Trustworthy Multi-Modal Motion Prediction: Evaluation and Interpretability
Oct 28, 2022



Predicting the motion of other road agents enables autonomous vehicles to perform safe and efficient path planning. This task is very complex, as the behaviour of road agents depends on many factors and the number of possible future trajectories can be considerable (multi-modal). Most approaches proposed to address multi-modal motion prediction are based on complex machine learning systems that have limited interpretability. Moreover, the metrics used in current benchmarks do not evaluate all aspects of the problem, such as the diversity and admissibility of the output. In this work, we aim to advance towards the design of trustworthy motion prediction systems, based on some of the requirements for the design of Trustworthy Artificial Intelligence. We focus on evaluation criteria, robustness, and interpretability of outputs. First, we comprehensively analyse the evaluation metrics, identify the main gaps of current benchmarks, and propose a new holistic evaluation framework. In addition, we formulate a method for the assessment of spatial and temporal robustness by simulating noise in the perception system. We propose an intent prediction layer that can be attached to multi-modal motion prediction models to enhance the interpretability of the outputs and generate more balanced results in the proposed evaluation framework. Finally, the interpretability of the outputs is assessed by means of a survey that explores different elements in the visualization of the multi-modal trajectories and intentions.
GAN-based generative modelling for dermatological applications -- comparative study
Aug 24, 2022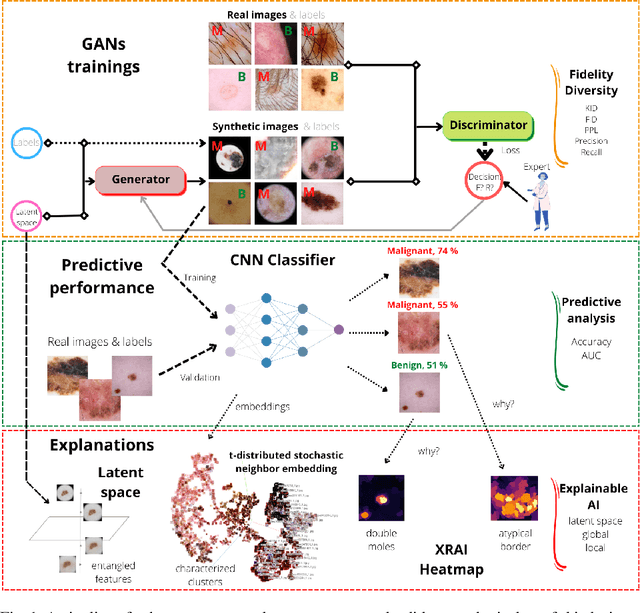
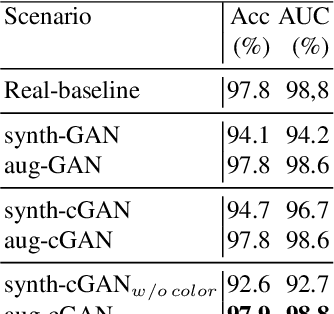
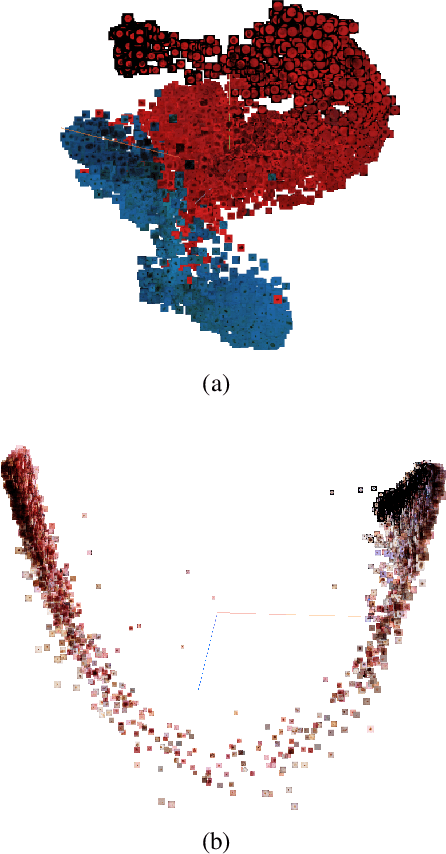
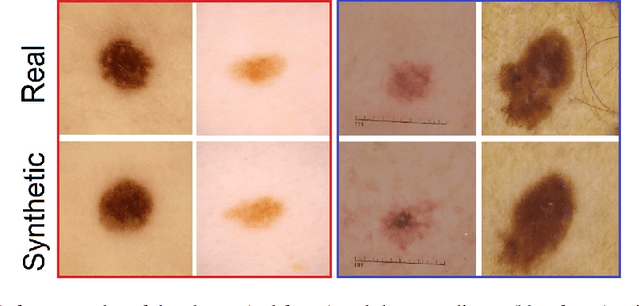
The lack of sufficiently large open medical databases is one of the biggest challenges in AI-powered healthcare. Synthetic data created using Generative Adversarial Networks (GANs) appears to be a good solution to mitigate the issues with privacy policies. The other type of cure is decentralized protocol across multiple medical institutions without exchanging local data samples. In this paper, we explored unconditional and conditional GANs in centralized and decentralized settings. The centralized setting imitates studies on large but highly unbalanced skin lesion dataset, while the decentralized one simulates a more realistic hospital scenario with three institutions. We evaluated models' performance in terms of fidelity, diversity, speed of training, and predictive ability of classifiers trained on the generated synthetic data. In addition we provided explainability through exploration of latent space and embeddings projection focused both on global and local explanations. Calculated distance between real images and their projections in the latent space proved the authenticity and generalization of trained GANs, which is one of the main concerns in this type of applications. The open source code for conducted studies is publicly available at \url{https://github.com/aidotse/stylegan2-ada-pytorch}.
The biasing effect of GAN-based augmentation methods on skin lesion images
Jun 30, 2022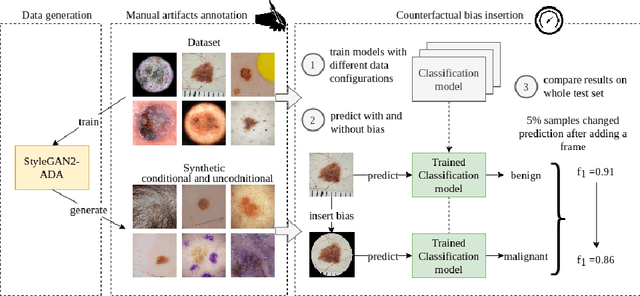
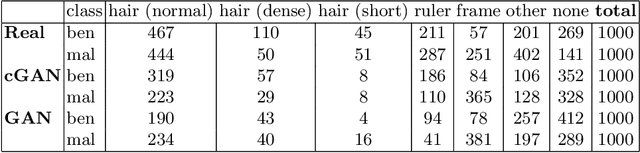
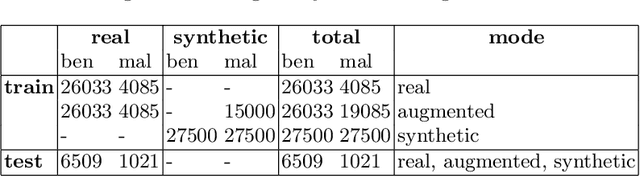
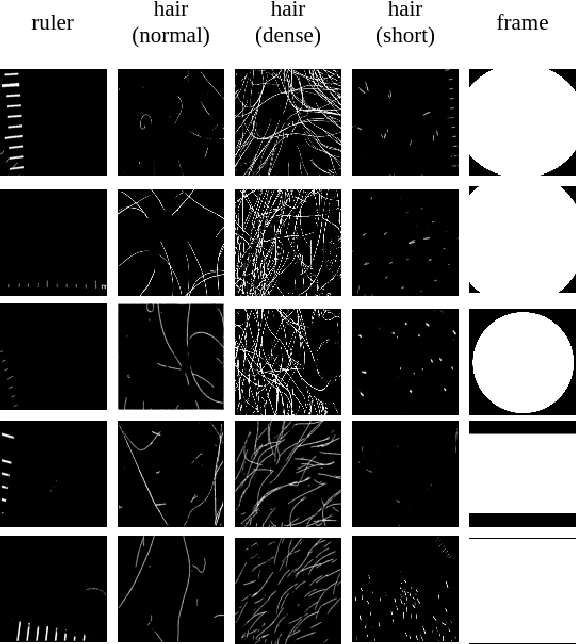
New medical datasets are now more open to the public, allowing for better and more extensive research. Although prepared with the utmost care, new datasets might still be a source of spurious correlations that affect the learning process. Moreover, data collections are usually not large enough and are often unbalanced. One approach to alleviate the data imbalance is using data augmentation with Generative Adversarial Networks (GANs) to extend the dataset with high-quality images. GANs are usually trained on the same biased datasets as the target data, resulting in more biased instances. This work explored unconditional and conditional GANs to compare their bias inheritance and how the synthetic data influenced the models. We provided extensive manual data annotation of possibly biasing artifacts on the well-known ISIC dataset with skin lesions. In addition, we examined classification models trained on both real and synthetic data with counterfactual bias explanations. Our experiments showed that GANs inherited biases and sometimes even amplified them, leading to even stronger spurious correlations. Manual data annotation and synthetic images are publicly available for reproducible scientific research.