 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable variable selection for two-view learning tasks with projection operators
Jul 04, 2023In this paper we propose a novel variable selection method for two-view settings, or for vector-valued supervised learning problems. Our framework is able to handle extremely large scale selection tasks, where number of data samples could be even millions. In a nutshell, our method performs variable selection by iteratively selecting variables that are highly correlated with the output variables, but which are not correlated with the previously chosen variables. To measure the correlation, our method uses the concept of projection operators and their algebra. With the projection operators the relationship, correlation, between sets of input and output variables can also be expressed by kernel functions, thus nonlinear correlation models can be exploited as well. We experimentally validate our approach, showing on both synthetic and real data its scalability and the relevance of the selected features. Keywords: Supervised variable selection, vector-valued learning, projection-valued measure, reproducing kernel Hilbert space
On the generalization of Tanimoto-type kernels to real valued functions
Jul 12, 2020
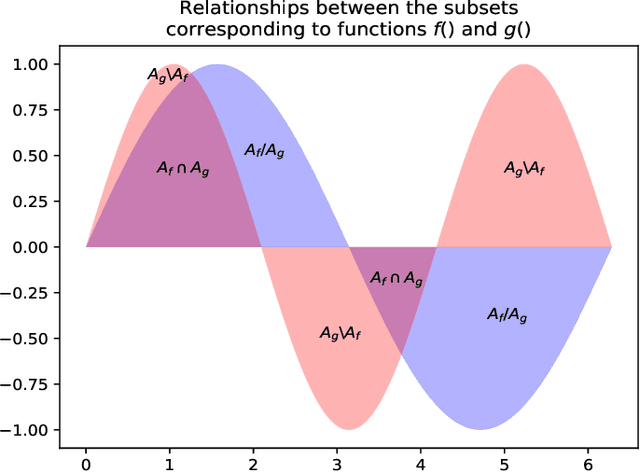
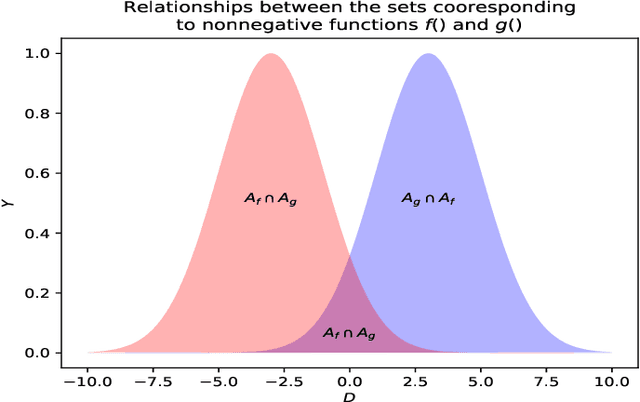
The Tanimoto kernel (Jaccard index) is a well known tool to describe the similarity between sets of binary attributes. It has been extended to the case when the attributes are nonnegative real values. This paper introduces a more general Tanimoto kernel formulation which allows to measure the similarity of arbitrary real-valued functions. This extension is constructed by unifying the representation of the attributes via properly chosen sets. After deriving the general form of the kernel, explicit feature representation is extracted from the kernel function, and a simply way of including general kernels into the Tanimoto kernel is shown. Finally, the kernel is also expressed as a quotient of piecewise linear functions, and a smooth approximation is provided.
A Solution for Large Scale Nonlinear Regression with High Rank and Degree at Constant Memory Complexity via Latent Tensor Reconstruction
May 04, 2020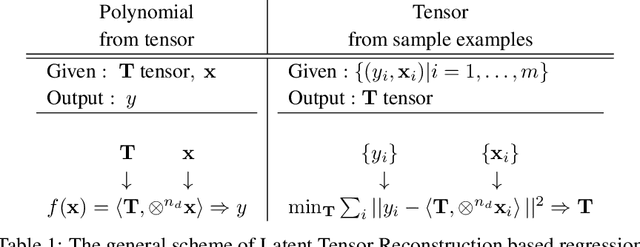
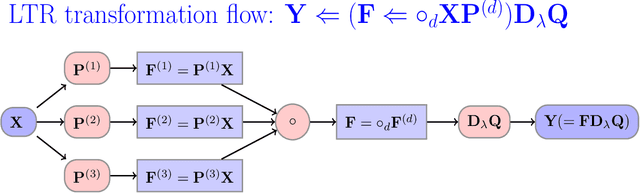

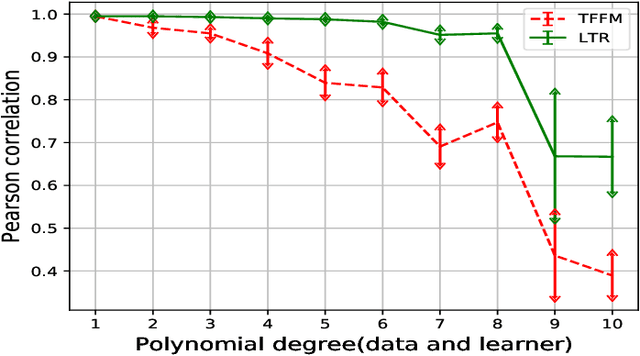
This paper proposes a novel method for learning highly nonlinear, multivariate functions from examples. Our method takes advantage of the property that continuous functions can be approximated by polynomials, which in turn are representable by tensors. Hence the function learning problem is transformed into a tensor reconstruction problem, an inverse problem of the tensor decomposition. Our method incrementally builds up the unknown tensor from rank-one terms, which lets us control the complexity of the learned model and reduce the chance of overfitting. For learning the models, we present an efficient gradient-based algorithm that can be implemented in linear time in the sample size, order, rank of the tensor and the dimension of the input. In addition to regression, we present extensions to classification, multi-view learning and vector-valued output as well as a multi-layered formulation. The method can work in an online fashion via processing mini-batches of the data with constant memory complexity. Consequently, it can fit into systems equipped only with limited resources such as embedded systems or mobile phones. Our experiments demonstrate a favorable accuracy and running time compared to competing methods.
Robotic Playing for Hierarchical Complex Skill Learning
Aug 13, 2017
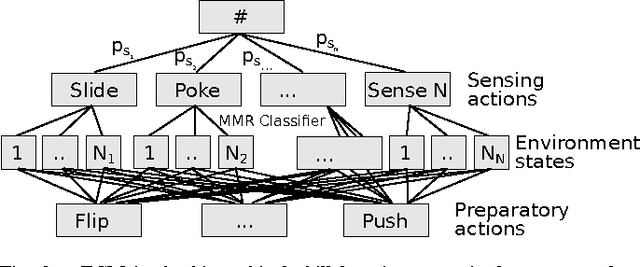
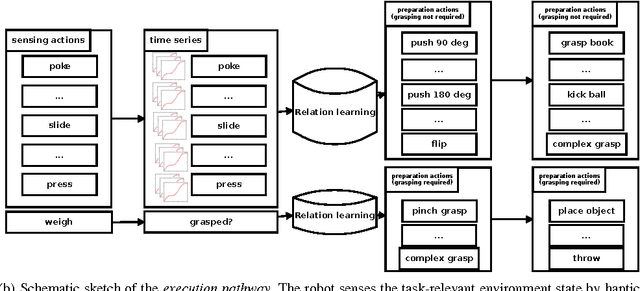
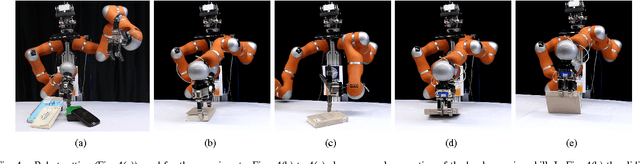
In complex manipulation scenarios (e.g. tasks requiring complex interaction of two hands or in-hand manipulation), generalization is a hard problem. Current methods still either require a substantial amount of (supervised) training data and / or strong assumptions on both the environment and the task. In this paradigm, controllers solving these tasks tend to be complex. We propose a paradigm of maintaining simpler controllers solving the task in a small number of specific situations. In order to generalize to novel situations, the robot transforms the environment from novel situations into a situation where the solution of the task is already known. Our solution to this problem is to play with objects and use previously trained skills (basis skills). These skills can either be used for estimating or for changing the current state of the environment and are organized in skill hierarchies. The approach is evaluated in complex pick-and-place scenarios that involve complex manipulation. We further show that these skills can be learned by autonomous playing.