 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMBUE: In-Memory Boolean-to-CUrrent Inference ArchitecturE for Tsetlin Machines
May 22, 2023



In-memory computing for Machine Learning (ML) applications remedies the von Neumann bottlenecks by organizing computation to exploit parallelism and locality. Non-volatile memory devices such as Resistive RAM (ReRAM) offer integrated switching and storage capabilities showing promising performance for ML applications. However, ReRAM devices have design challenges, such as non-linear digital-analog conversion and circuit overheads. This paper proposes an In-Memory Boolean-to-Current Inference Architecture (IMBUE) that uses ReRAM-transistor cells to eliminate the need for such conversions. IMBUE processes Boolean feature inputs expressed as digital voltages and generates parallel current paths based on resistive memory states. The proportional column current is then translated back to the Boolean domain for further digital processing. The IMBUE architecture is inspired by the Tsetlin Machine (TM), an emerging ML algorithm based on intrinsically Boolean logic. The IMBUE architecture demonstrates significant performance improvements over binarized convolutional neural networks and digital TM in-memory implementations, achieving up to a 12.99x and 5.28x increase, respectively.
Single Storage Semi-Global Matching for Real Time Depth Processing
Jul 07, 2020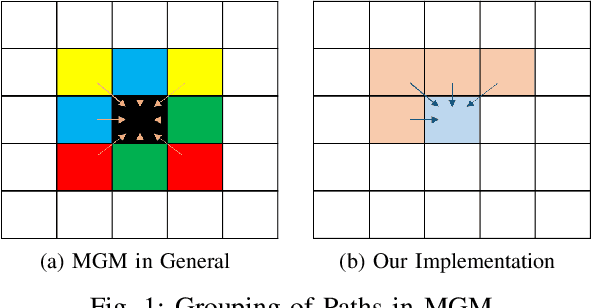
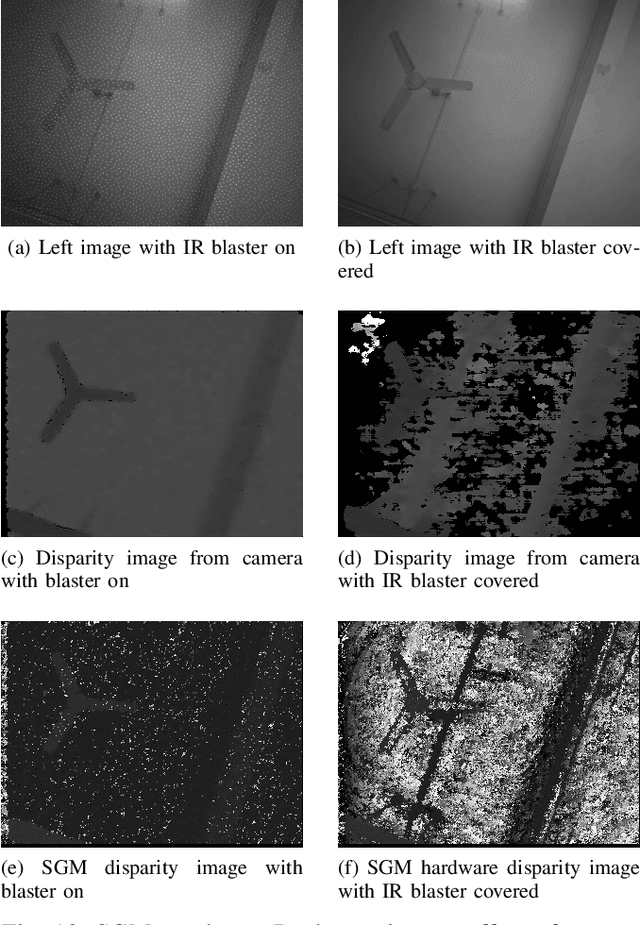
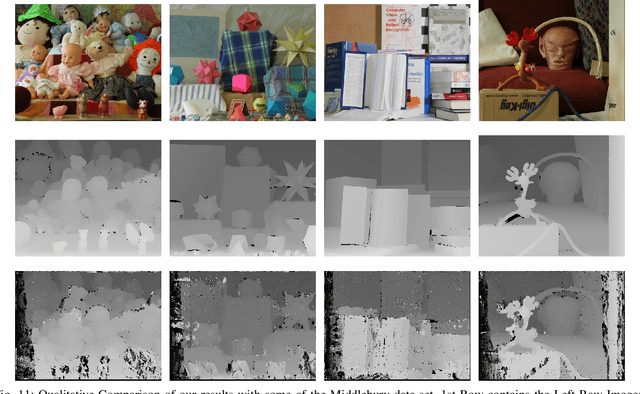
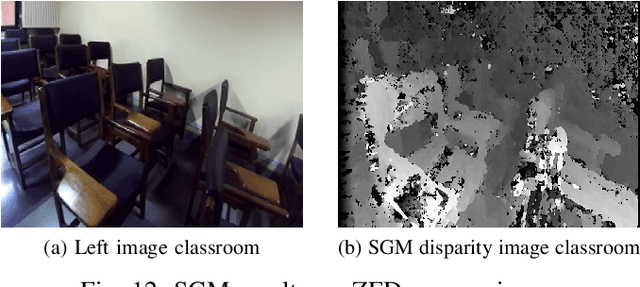
Depth-map is the key computation in computer vision and robotics. One of the most popular approach is via computation of disparity-map of images obtained from Stereo Camera. Semi Global Matching (SGM) method is a popular choice for good accuracy with reasonable computation time. To use such compute-intensive algorithms for real-time applications such as for autonomous aerial vehicles, blind Aid, etc. acceleration using GPU, FPGA is necessary. In this paper, we show the design and implementation of a stereo-vision system, which is based on FPGA-implementation of More Global Matching(MGM). MGM is a variant of SGM. We use 4 paths but store a single cumulative cost value for a corresponding pixel. Our stereo-vision prototype uses Zedboard containing an ARM-based Zynq-SoC, ZED-stereo-camera / ELP stereo-camera / Intel RealSense D435i, and VGA for visualization. The power consumption attributed to the custom FPGA-based acceleration of disparity map computation required for depth-map is just 0.72 watt. The update rate of the disparity map is realistic 10.5 fps.