 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle Storage Semi-Global Matching for Real Time Depth Processing
Paper and Code
Jul 07, 2020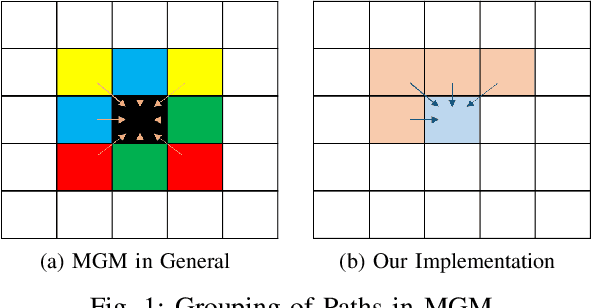
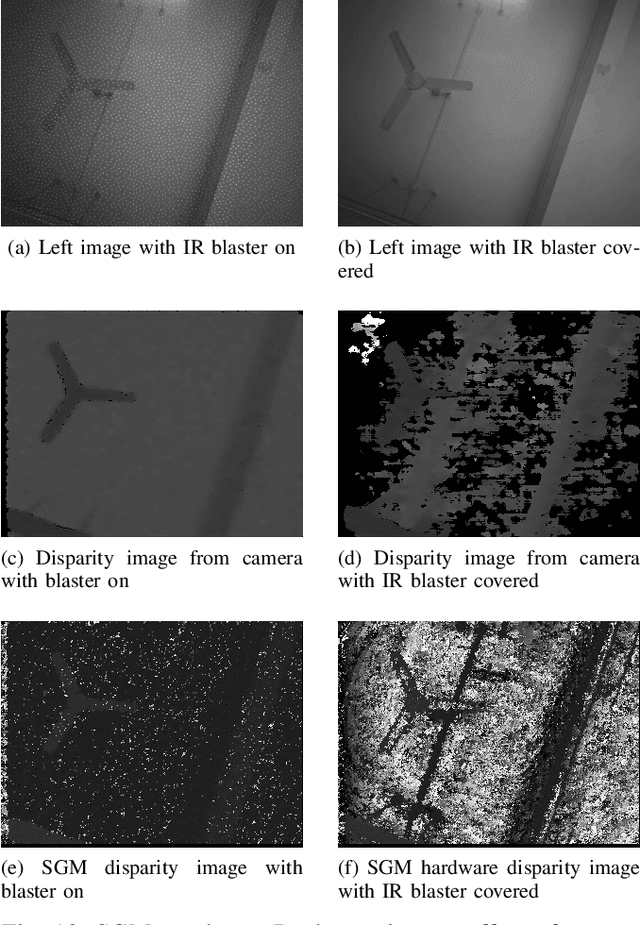
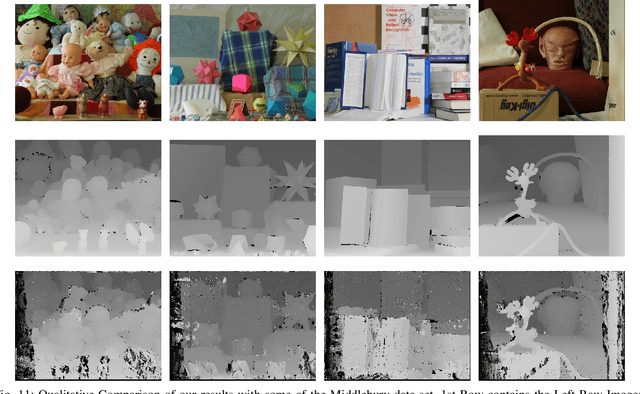
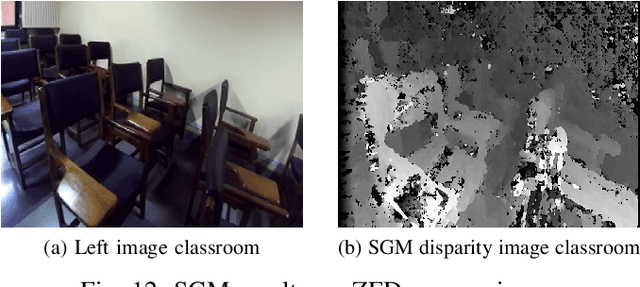
Depth-map is the key computation in computer vision and robotics. One of the most popular approach is via computation of disparity-map of images obtained from Stereo Camera. Semi Global Matching (SGM) method is a popular choice for good accuracy with reasonable computation time. To use such compute-intensive algorithms for real-time applications such as for autonomous aerial vehicles, blind Aid, etc. acceleration using GPU, FPGA is necessary. In this paper, we show the design and implementation of a stereo-vision system, which is based on FPGA-implementation of More Global Matching(MGM). MGM is a variant of SGM. We use 4 paths but store a single cumulative cost value for a corresponding pixel. Our stereo-vision prototype uses Zedboard containing an ARM-based Zynq-SoC, ZED-stereo-camera / ELP stereo-camera / Intel RealSense D435i, and VGA for visualization. The power consumption attributed to the custom FPGA-based acceleration of disparity map computation required for depth-map is just 0.72 watt. The update rate of the disparity map is realistic 10.5 fps.