 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParsiNLU: A Suite of Language Understanding Challenges for Persian
Dec 11, 2020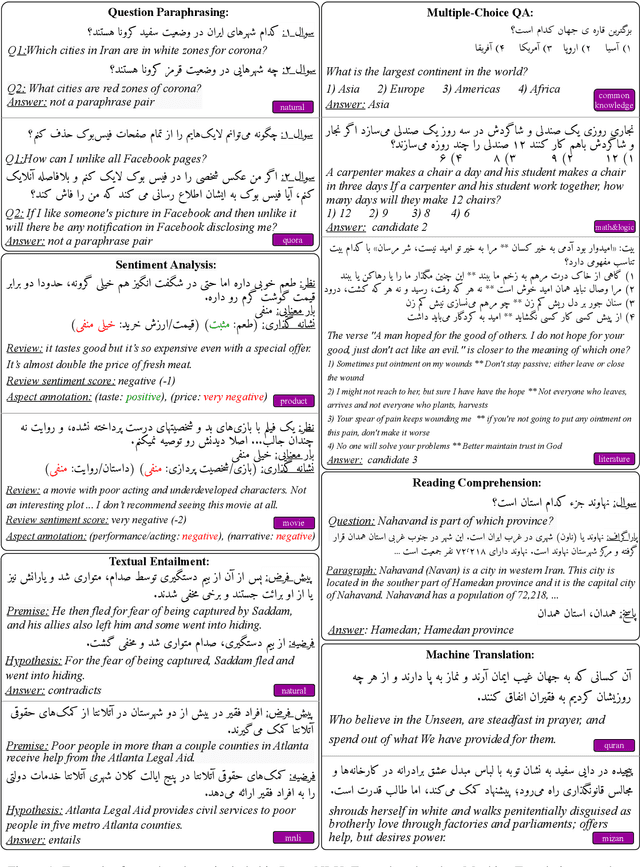
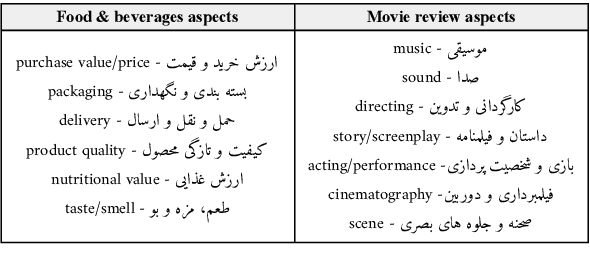
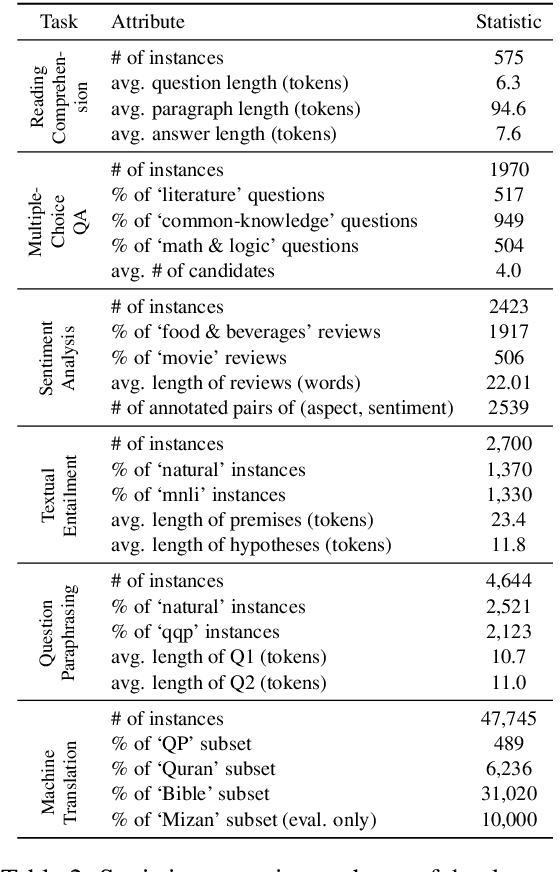

Despite the progress made in recent years in addressing natural language understanding (NLU) challenges, the majority of this progress remains to be concentrated on resource-rich languages like English. This work focuses on Persian language, one of the widely spoken languages in the world, and yet there are few NLU datasets available for this rich language. The availability of high-quality evaluation datasets is a necessity for reliable assessment of the progress on different NLU tasks and domains. We introduce ParsiNLU, the first benchmark in Persian language that includes a range of high-level tasks -- Reading Comprehension, Textual Entailment, etc. These datasets are collected in a multitude of ways, often involving manual annotations by native speakers. This results in over 14.5$k$ new instances across 6 distinct NLU tasks. Besides, we present the first results on state-of-the-art monolingual and multi-lingual pre-trained language-models on this benchmark and compare them with human performance, which provides valuable insights into our ability to tackle natural language understanding challenges in Persian. We hope ParsiNLU fosters further research and advances in Persian language understanding.
Evolving Dyadic Strategies for a Cooperative Physical Task
Apr 22, 2020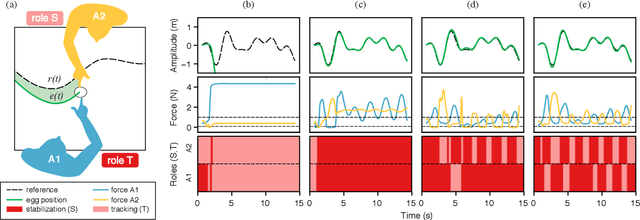
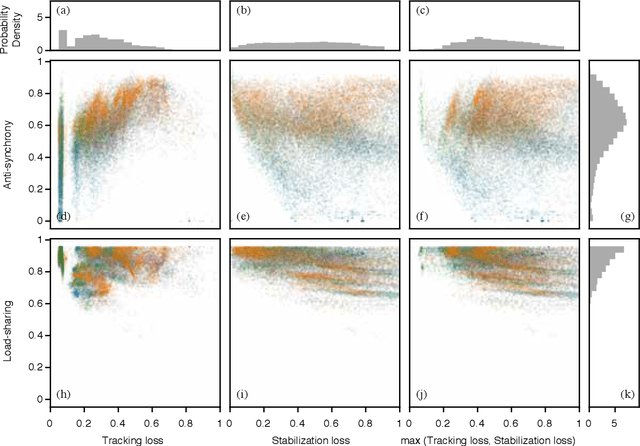
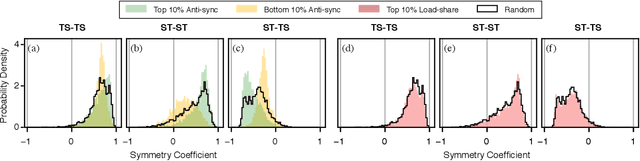
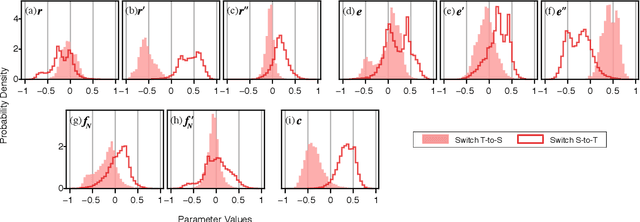
Many cooperative physical tasks require that individuals play specialized roles (e.g., leader-follower). Humans are adept cooperators, negotiating these roles and transitions between roles innately. Yet how roles are delegated and reassigned is not well understood. Using a genetic algorithm, we evolve simulated agents to explore a space of feasible role-switching policies. Applying these switching policies in a cooperative manual task, agents process visual and haptic cues to decide when to switch roles. We then analyze the evolved virtual population for attributes typically associated with cooperation: load sharing and temporal coordination. We find that the best performing dyads exhibit high temporal coordination (anti-synchrony). And in turn, anti-synchrony is correlated to symmetry between the parameters of the cooperative agents. These simulations furnish hypotheses as to how human cooperators might mediate roles in dyadic tasks.