 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolving Dyadic Strategies for a Cooperative Physical Task
Apr 22, 2020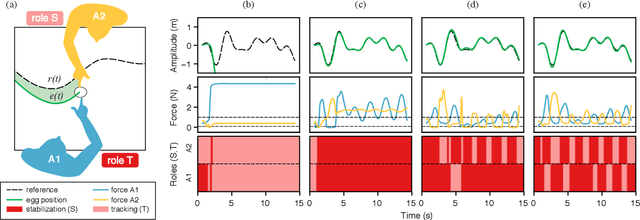
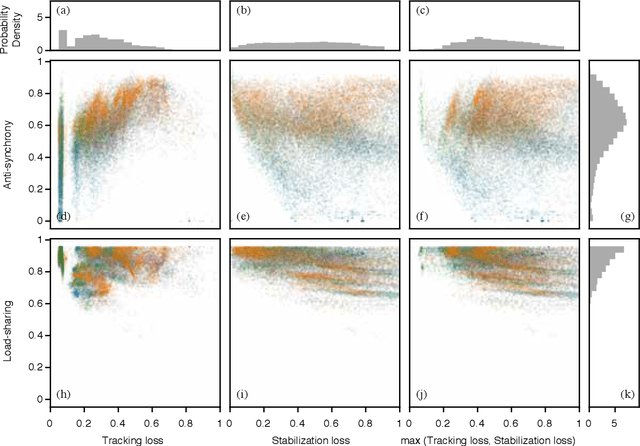
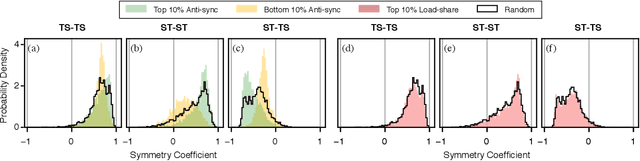
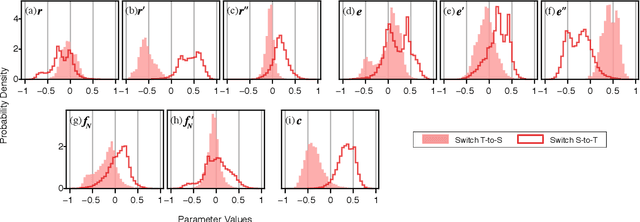
Many cooperative physical tasks require that individuals play specialized roles (e.g., leader-follower). Humans are adept cooperators, negotiating these roles and transitions between roles innately. Yet how roles are delegated and reassigned is not well understood. Using a genetic algorithm, we evolve simulated agents to explore a space of feasible role-switching policies. Applying these switching policies in a cooperative manual task, agents process visual and haptic cues to decide when to switch roles. We then analyze the evolved virtual population for attributes typically associated with cooperation: load sharing and temporal coordination. We find that the best performing dyads exhibit high temporal coordination (anti-synchrony). And in turn, anti-synchrony is correlated to symmetry between the parameters of the cooperative agents. These simulations furnish hypotheses as to how human cooperators might mediate roles in dyadic tasks.