 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoNovel: Automatically Discovering and Learning Novel Visual Categories
Jun 29, 2021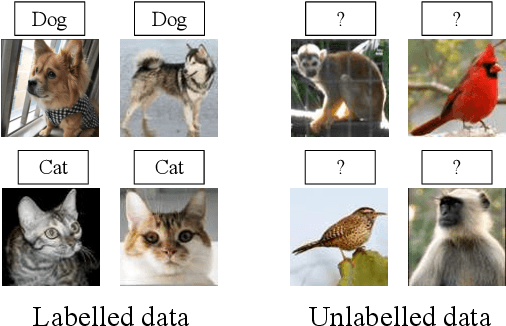



We tackle the problem of discovering novel classes in an image collection given labelled examples of other classes. We present a new approach called AutoNovel to address this problem by combining three ideas: (1) we suggest that the common approach of bootstrapping an image representation using the labelled data only introduces an unwanted bias, and that this can be avoided by using self-supervised learning to train the representation from scratch on the union of labelled and unlabelled data; (2) we use ranking statistics to transfer the model's knowledge of the labelled classes to the problem of clustering the unlabelled images; and, (3) we train the data representation by optimizing a joint objective function on the labelled and unlabelled subsets of the data, improving both the supervised classification of the labelled data, and the clustering of the unlabelled data. Moreover, we propose a method to estimate the number of classes for the case where the number of new categories is not known a priori. We evaluate AutoNovel on standard classification benchmarks and substantially outperform current methods for novel category discovery. In addition, we also show that AutoNovel can be used for fully unsupervised image clustering, achieving promising results.
Unsupervised Intuitive Physics from Past Experiences
May 26, 2019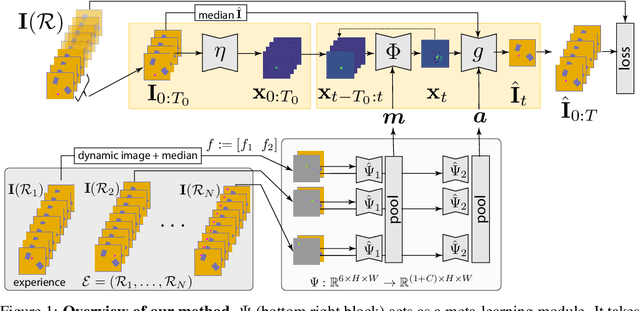
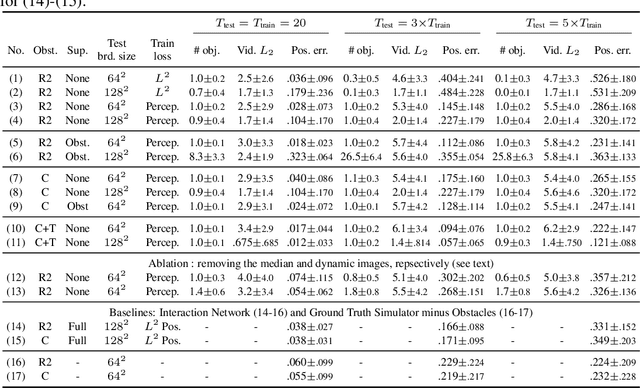


We are interested in learning models of intuitive physics similar to the ones that animals use for navigation, manipulation and planning. In addition to learning general physical principles, however, we are also interested in learning ``on the fly'', from a few experiences, physical properties specific to new environments. We do all this in an unsupervised manner, using a meta-learning formulation where the goal is to predict videos containing demonstrations of physical phenomena, such as objects moving and colliding with a complex background. We introduce the idea of summarizing past experiences in a very compact manner, in our case using dynamic images, and show that this can be used to solve the problem well and efficiently. Empirically, we show via extensive experiments and ablation studies, that our model learns to perform physical predictions that generalize well in time and space, as well as to a variable number of interacting physical objects.
Learning to Represent Mechanics via Long-term Extrapolation and Interpolation
Jun 08, 2017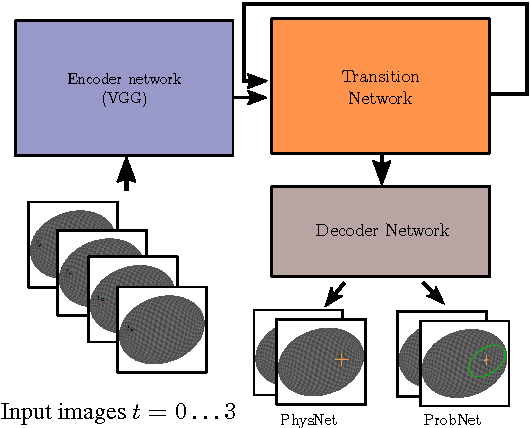
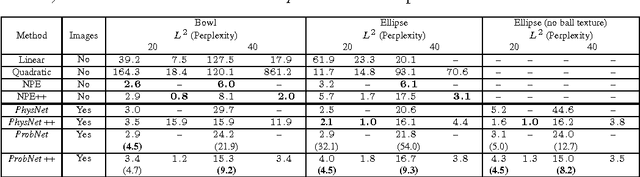
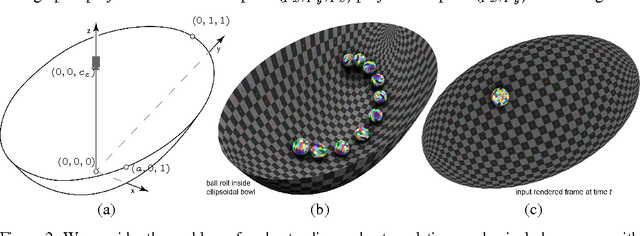
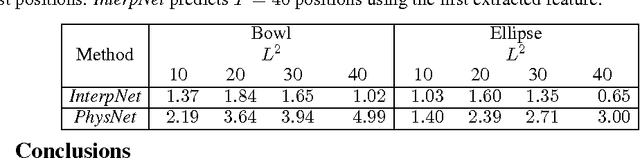
While the basic laws of Newtonian mechanics are well understood, explaining a physical scenario still requires manually modeling the problem with suitable equations and associated parameters. In order to adopt such models for artificial intelligence, researchers have handcrafted the relevant states, and then used neural networks to learn the state transitions using simulation runs as training data. Unfortunately, such approaches can be unsuitable for modeling complex real-world scenarios, where manually authoring relevant state spaces tend to be challenging. In this work, we investigate if neural networks can implicitly learn physical states of real-world mechanical processes only based on visual data, and thus enable long-term physical extrapolation. We develop a recurrent neural network architecture for this task and also characterize resultant uncertainties in the form of evolving variance estimates. We evaluate our setup to extrapolate motion of a rolling ball on bowl of varying shape and orientation using only images as input, and report competitive results with approaches that assume access to internal physics models and parameters.
Stopping GAN Violence: Generative Unadversarial Networks
Mar 07, 2017


While the costs of human violence have attracted a great deal of attention from the research community, the effects of the network-on-network (NoN) violence popularised by Generative Adversarial Networks have yet to be addressed. In this work, we quantify the financial, social, spiritual, cultural, grammatical and dermatological impact of this aggression and address the issue by proposing a more peaceful approach which we term Generative Unadversarial Networks (GUNs). Under this framework, we simultaneously train two models: a generator G that does its best to capture whichever data distribution it feels it can manage, and a motivator M that helps G to achieve its dream. Fighting is strictly verboten and both models evolve by learning to respect their differences. The framework is both theoretically and electrically grounded in game theory, and can be viewed as a winner-shares-all two-player game in which both players work as a team to achieve the best score. Experiments show that by working in harmony, the proposed model is able to claim both the moral and log-likelihood high ground. Our work builds on a rich history of carefully argued position-papers, published as anonymous YouTube comments, which prove that the optimal solution to NoN violence is more GUNs.