 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Incremental State Estimation through Covariance Adaptation
Oct 11, 2019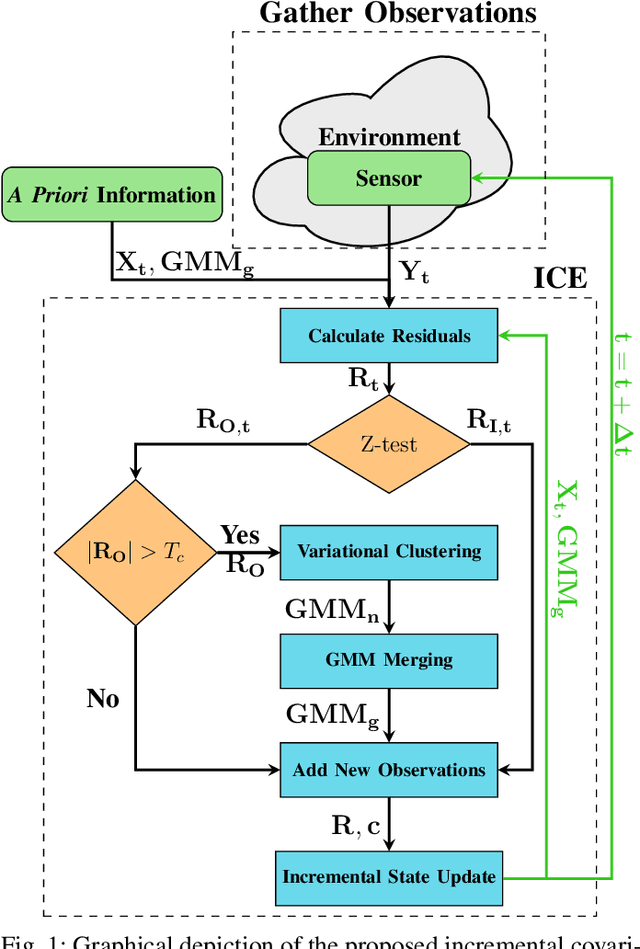
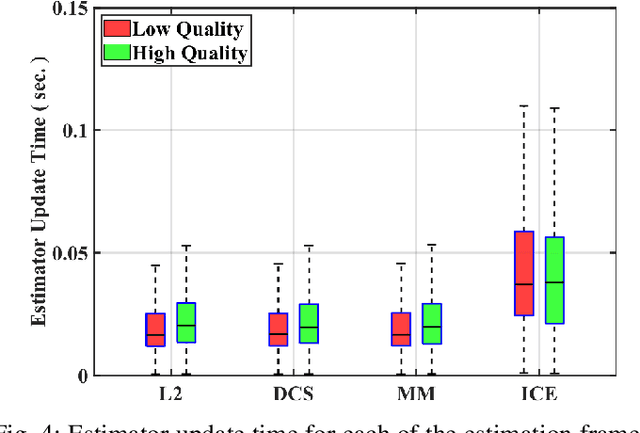
Recent advances in the fields of robotics and automation have spurred significant interest in robust state estimation. To enable robust state estimation, several methodologies have been proposed. One such technique, which has shown promising performance, is the concept of iteratively estimating a Gaussian Mixture Model (GMM), based upon the state estimation residuals, to characterize the measurement uncertainty model. Through this iterative process, the measurement uncertainty model is more accurately characterized, which enables robust state estimation through the appropriate de-weighting of erroneous observations. This approach, however, has traditionally required a batch estimation framework to enable the estimation of the measurement uncertainty model, which is not advantageous to robotic applications. In this paper, we propose an efficient, incremental extension to the measurement uncertainty model estimation paradigm. The incremental covariance estimation (ICE) approach, as detailed within this paper, is evaluated on several collected data sets, where it is shown to provide a significant increase in localization accuracy when compared to other state-of-the-art robust, incremental estimation algorithms.
Enabling Robust State Estimation through Measurement Error Covariance Adaptation
Jun 10, 2019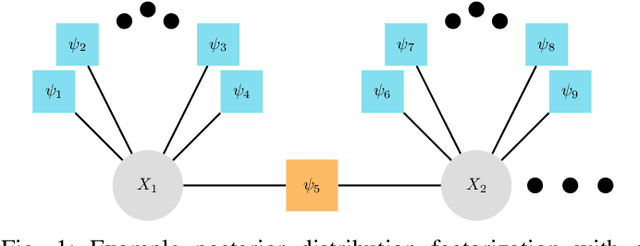
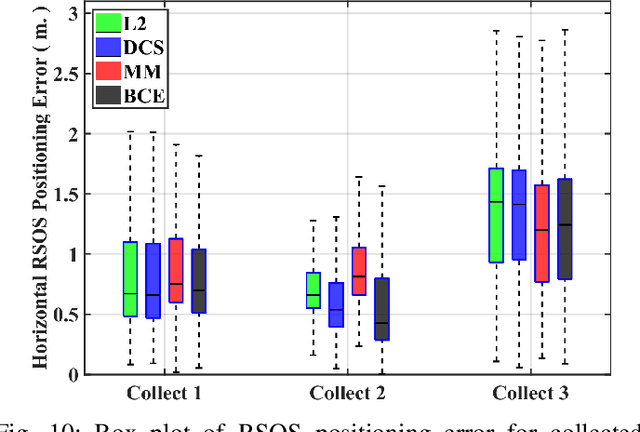
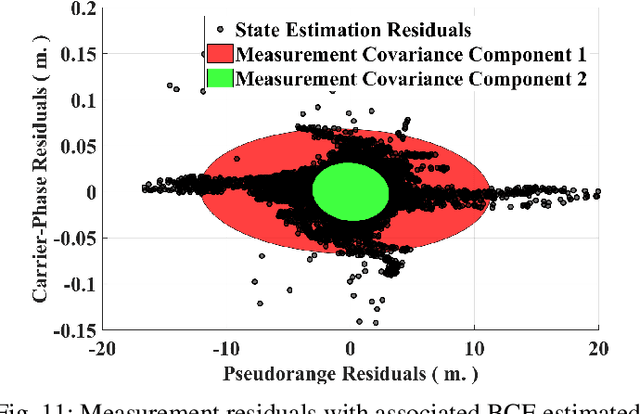
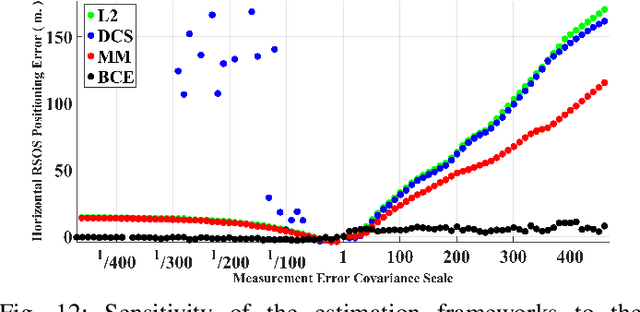
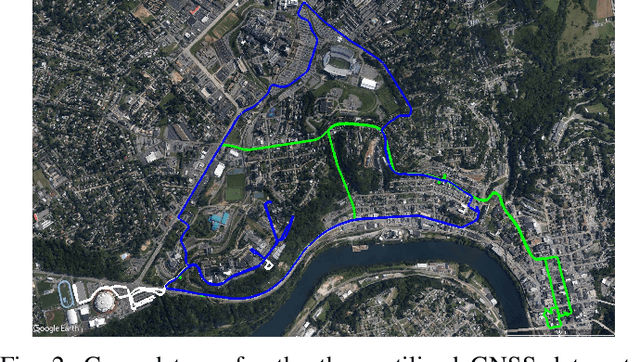
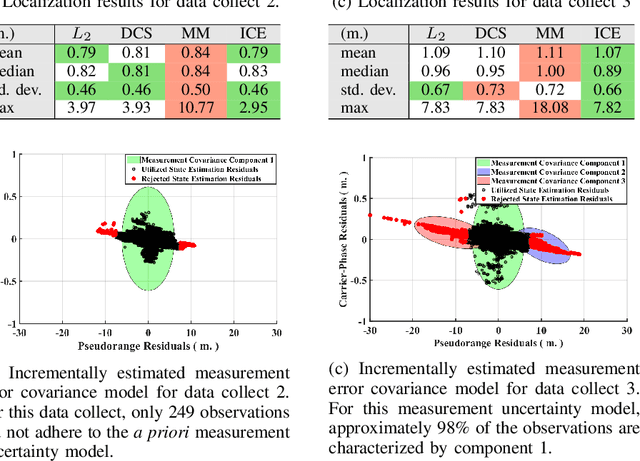
Accurate platform localization is an integral component of most robotic systems. As these robotic systems become more ubiquitous, it is necessary to develop robust state estimation algorithms that are able to withstand novel and non-cooperative environments. When dealing with novel and non-cooperative environments, little is known a priori about the measurement error uncertainty, thus, there is a requirement that the uncertainty models of the localization algorithm be adaptive. Within this paper, we propose one such technique that enables robust state estimation through the iterative adaptation of the measurement uncertainty model. The adaptation of the measurement uncertainty model is granted through non-parametric clustering of the residuals, which enables the characterization of the measurement uncertainty via a Gaussian mixture model. The provided Gaussian mixture model can be utilized within any non-linear least squares optimization algorithm by approximately characterizing each observation with the sufficient statistics of the assigned cluster (i.e., each observation's uncertainty model is updated based upon the assignment provided by the non-parametric clustering algorithm). The proposed algorithm is verified on several GNSS collected data sets, where it is shown that the proposed technique exhibits some advantages when compared to other robust estimation techniques when confronted with degraded data quality.
Robust Navigation In GNSS Degraded Environment Using Graph Optimization
Jun 23, 2018
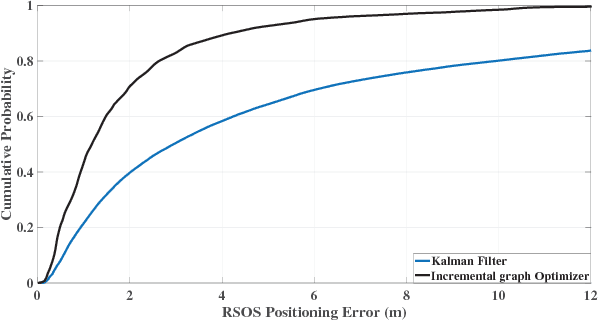
Robust navigation in urban environments has received a considerable amount of both academic and commercial interest over recent years. This is primarily due to large commercial organizations such as Google and Uber stepping into the autonomous navigation market. Most of this research has shied away from Global Navigation Satellite System (GNSS) based navigation. The aversion to utilizing GNSS data is due to the degraded nature of the data in urban environment (e.g., multipath, poor satellite visibility). The degradation of the GNSS data in urban environments makes it such that traditional (GNSS) positioning methods (e.g., extended Kalman filter, particle filters) perform poorly. However, recent advances in robust graph theoretic based sensor fusion methods, primarily applied to Simultaneous Localization and Mapping (SLAM) based robotic applications, can also be applied to GNSS data processing. This paper will utilize one such method known as the factor graph in conjunction several robust optimization techniques to evaluate their applicability to robust GNSS data processing. The goals of this study are two-fold. First, for GNSS applications, we will experimentally evaluate the effectiveness of robust optimization techniques within a graph-theoretic estimation framework. Second, by releasing the software developed and data sets used for this study, we will introduce a new open-source front-end to the Georgia Tech Smoothing and Mapping (GTSAM) library for the purpose of integrating GNSS pseudorange observations.
Evaluation of Kinematic Precise Point Positioning Convergence with an Incremental Graph Optimizer
Apr 11, 2018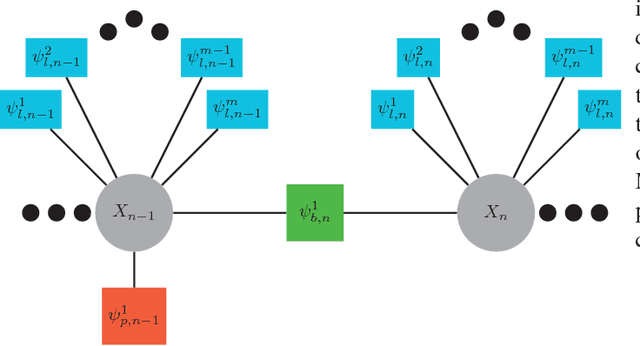
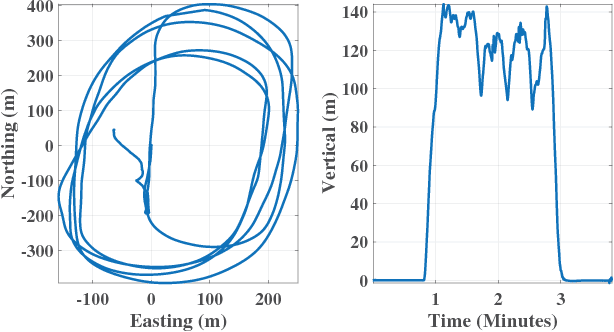
Estimation techniques to precisely localize a kinematic platform with GNSS observables can be broadly partitioned into two categories: differential, or undifferenced. The differential techniques (e.g., real-time kinematic (RTK)) have several attractive properties, such as correlated error mitigation and fast convergence; however, to support a differential processing scheme, an infrastructure of reference stations within a proximity of the platform must be in place to construct observation corrections. This infrastructure requirement makes differential processing techniques infeasible in many locations. To mitigate the need for additional receivers within proximity of the platform, the precise point positioning (PPP) method utilizes accurate orbit and clock models to localize the platform. The autonomy of PPP from local reference stations make it an attractive processing scheme for several applications; however, a current disadvantage of PPP is the slow positioning convergence when compared to differential techniques. In this paper, we evaluate the convergence properties of PPP with an incremental graph optimization scheme (Incremental Smoothing and Mapping (iSAM2)), which allows for real-time filtering and smoothing. The characterization is first conducted through a Monte Carlo analysis within a simulation environment, which allows for the variations of parameters, such as atmospheric conditions, satellite geometry, and intensity of multipath. Then, an example collected data set is utilized to validate the trends presented in the simulation study.
* 8 pages